

Fruit and vegetable growth form visual identification method in natural environment
A natural environment and identification method technology, applied in the field of fruit and vegetable shape pattern recognition for picking robots, can solve the problems of lagging picking robot practical progress, single fruit and vegetable growth shape determination, and no fruit and vegetable identification methods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
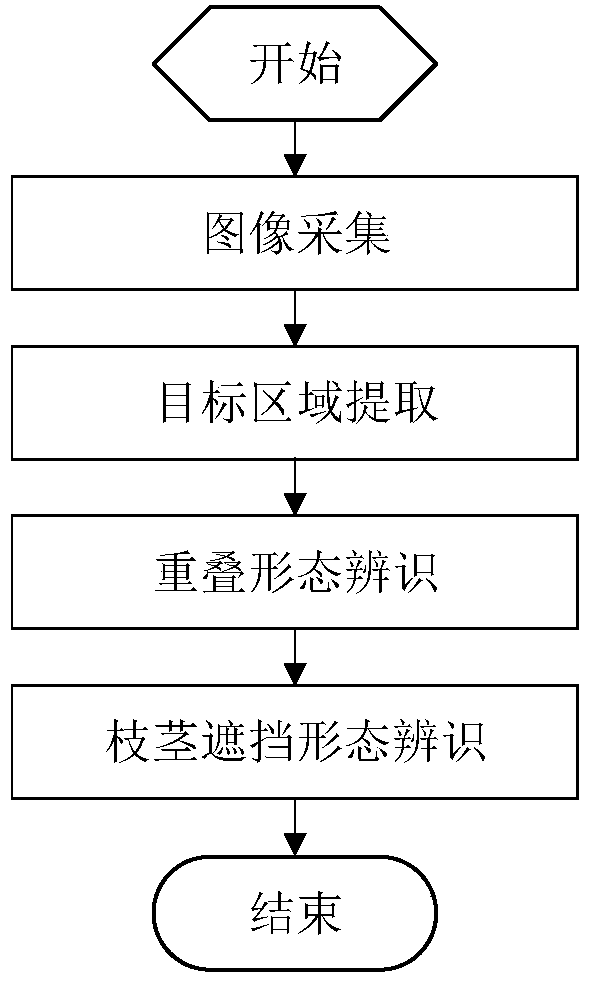
[0014] Embodiments of the present invention will be further described below in conjunction with the accompanying drawings. The visual recognition process of fruit and vegetable growth form (see figure 1 )as follows:
[0015] (1) Image acquisition steps
[0016] The image acquisition is based on the monocular vision sensor, which is used for the subsequent extraction of the target area. In order to be suitable for the visual recognition of the growth form of fruits and vegetables in the day and night environment, a star-level camera system is used to collect images of fruits and vegetables. The image captured by the starlight camera system under natural light during the day is no different from that of the ordinary camera system, and it can also capture clearer color images without any auxiliary light source under low light conditions at night.
[0017] (2) The target area extraction step processes the collected image to extract the fruit and vegetable area with branches and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More