

Wheeled obstacle crossing robot with deformable frame structure
A technology of frame structure and robot, applied in the directions of manipulators, motor vehicles, manufacturing tools, etc., can solve problems such as difficulty and achieve the effect of improving the overall rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0051] In the following detailed description, directional terms, such as "left", "right", "upper", "lower", "front", "rear", etc., are used with reference to directions described in the drawings. Components of embodiments of the present invention may be positioned in a variety of different orientations, and directional terms are used for purposes of illustration and not limitation.
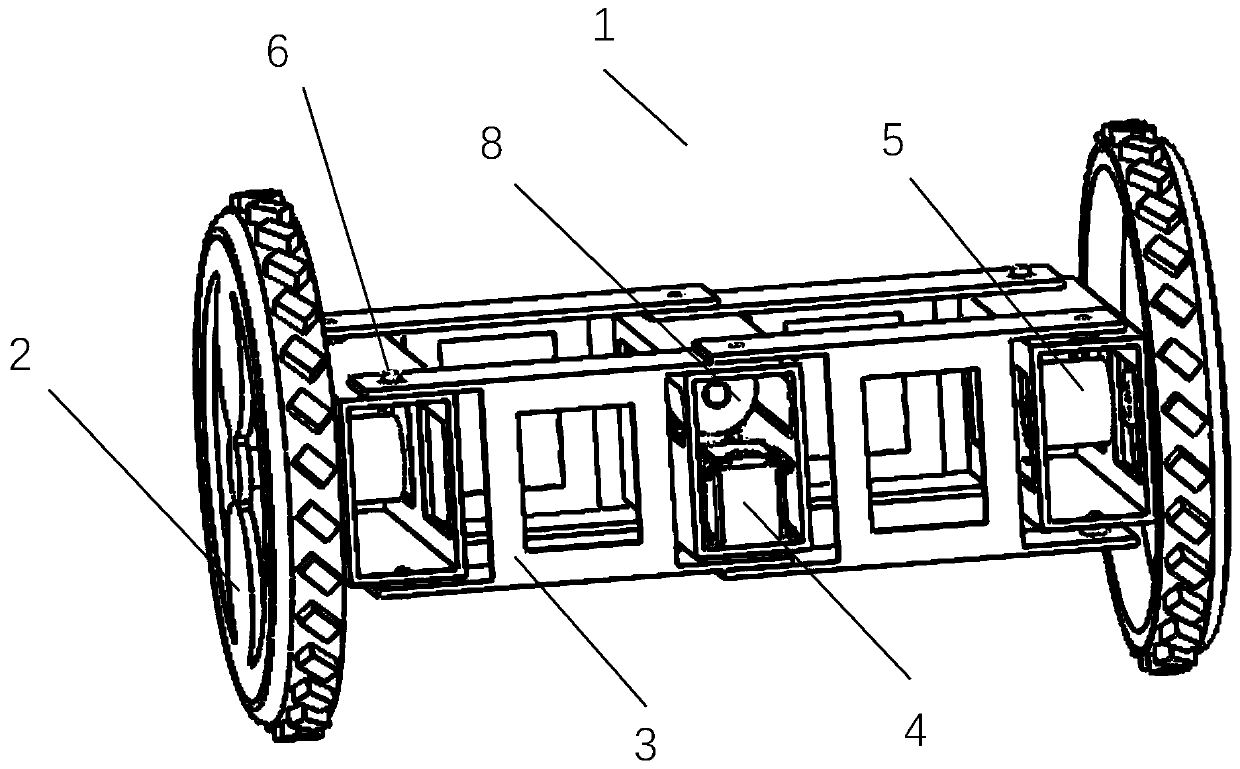
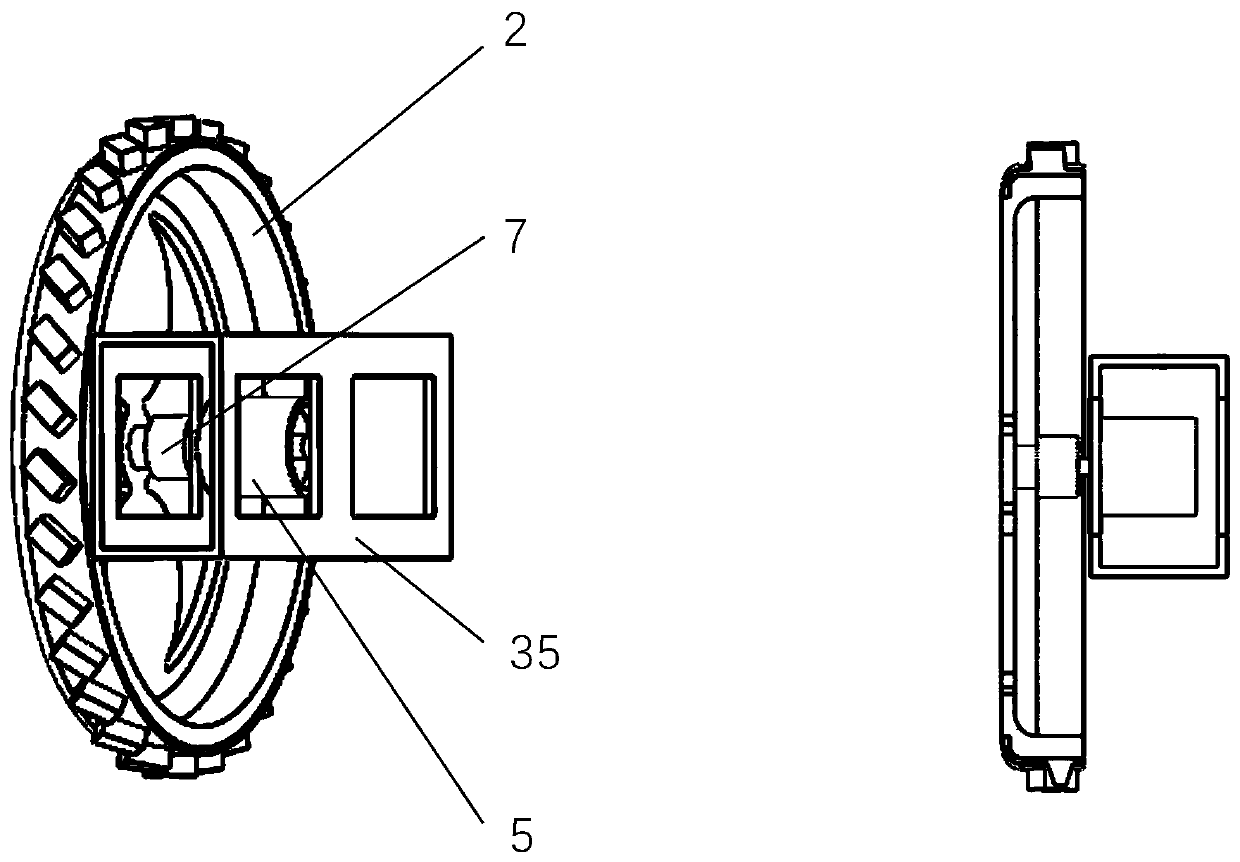
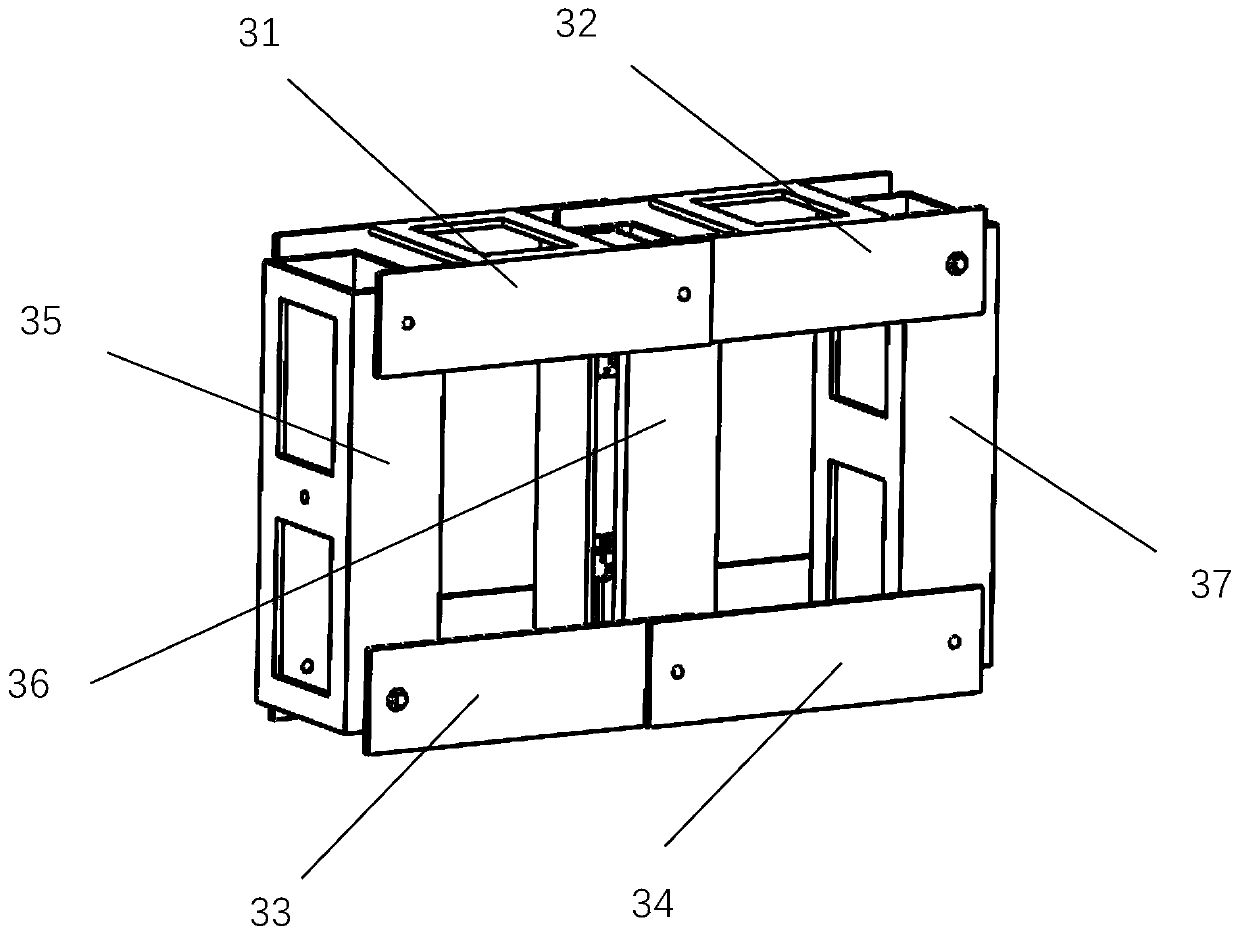
[0052] Embodiments of the present invention provide a wheeled obstacle-surmounting robot 1 with a deformable frame structure, such as Figure 1-Figure 7 As shown, the wheeled obstacle-surpassing robot 1 with a deformable frame structure of the present invention includes a wheel 2, a drive motor 5, a deformable steering gear 4, a panoramic camera 8 and a do...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More