Brake control method for unmanned vehicle
An unmanned vehicle, braking control technology, applied in the direction of control devices, vehicle components, external condition input parameters, etc., can solve problems such as vehicle parking by mistake, bad experience, and failure to detect obstacles in time, and achieve effective braking Effects of controlling and improving driving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments.
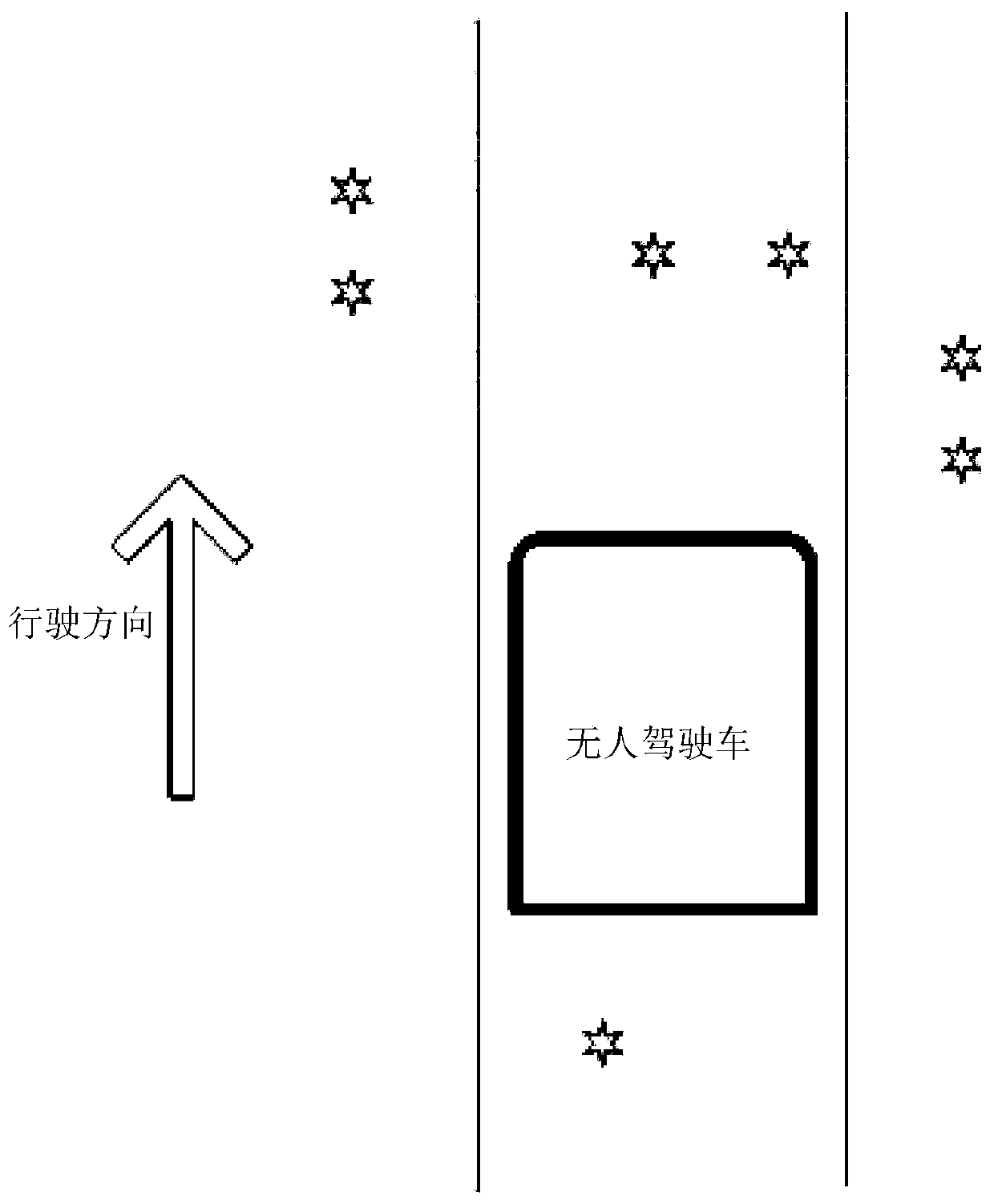
[0036] An embodiment of the present invention provides a braking control method for an unmanned vehicle, which is especially suitable for braking control when the automatic driving vehicle is turning or making a U-turn.
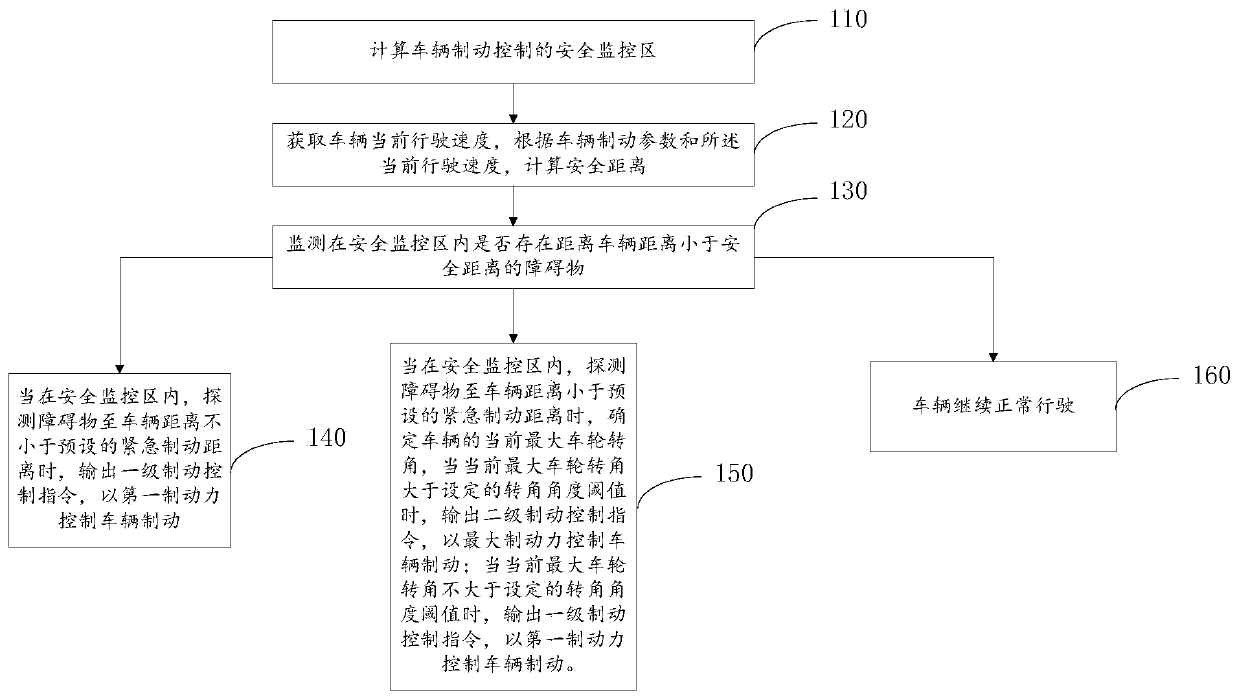
[0037] The brake control method provided by the present invention, its execution method is as follows image 3 As shown, it mainly includes the following steps:
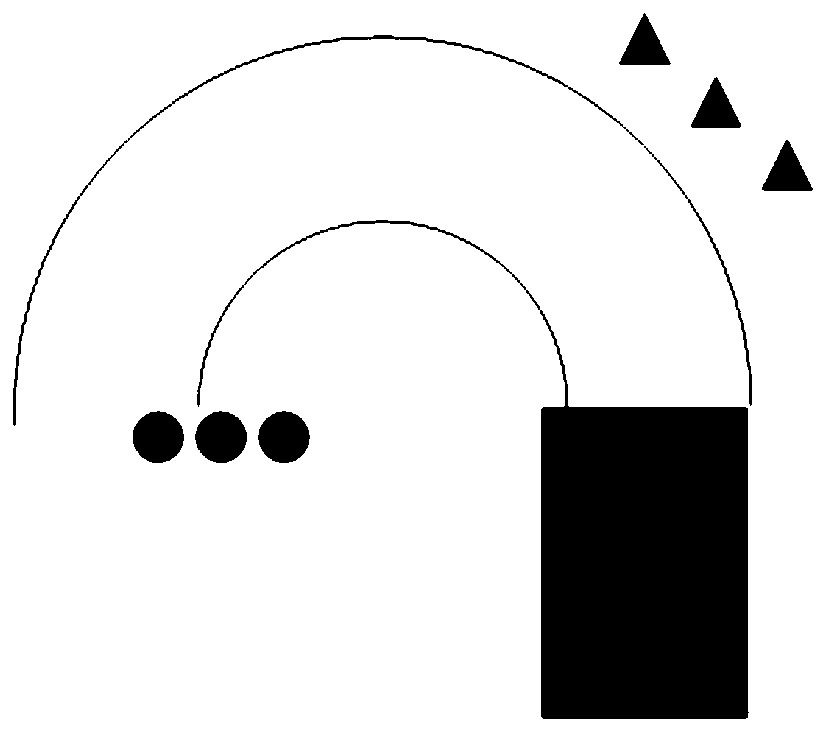
[0038] Step 110, calculating the safety monitoring area for vehicle braking control;
[0039] According to the existing kinematic bicycle model in the industry, assuming that the vehicle is shaped like a bicycle, the entire control quantity can be simplified as (a,δ f ), where a is the acceleration of the vehicle, stepping on the gas pedal means positive acceleration, and stepping on the brake pedal means negative acceleration. δ f is ou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com