

Static Gait Planning Method for Quadruped Robot Based on Terrain Fuzzy Adaptive
A quadruped robot, fuzzy self-adaptive technology, applied to manipulators, motor vehicles, program-controlled manipulators, etc., to avoid sudden changes in speed or acceleration and improve terrain adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
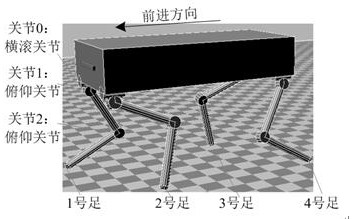
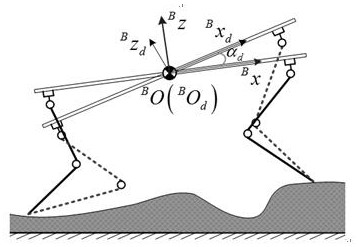
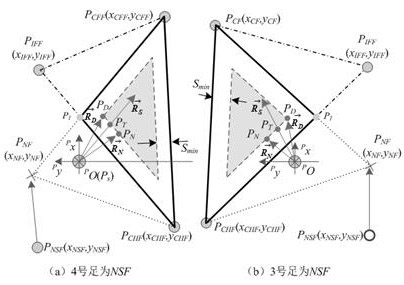
[0060] The present invention divides the entire free gait planning process of the quadruped robot into multiple gait cycles, and each gait cycle includes a three-foot support stage (Three Feet Support Stage, TFSP) and a four-foot support stage (Four Feet Support Stage, FFSP). In the three-legged support stage, the quadruped robot completes the stepping motion of the two feet on the same side of the body in turn, and in the four-legged support stage, the pitch angle of the trunk is first adjusted to ensure that the robot's swinging feet are in the three-legged support stage. The swing foot has enough working space to cross obstacles on the terrain; after that, the projection of the center of gravity of the torso is adjusted to the corresponding stable area through the support of the four feet, so as to ensure that the robot can stably complete the step of the other two feet Movement; when the swinging foot in a certain gait cycle touches the ground, the robot will carry out the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More