

Method for generating free gaits for four-footed bionic robot
A bionic robot and quadruped robot technology is applied in the field of generating the free gait of quadruped bionic robot, which can solve the problems of robot stability, motion continuity, rapidity and flexibility, etc., so as to improve terrain adaptability, The effect of increasing movement speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
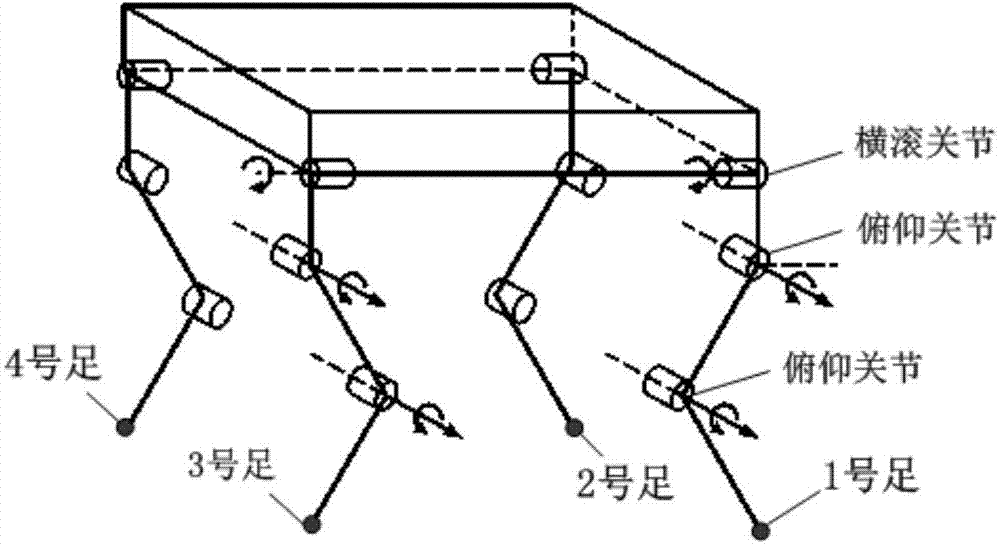
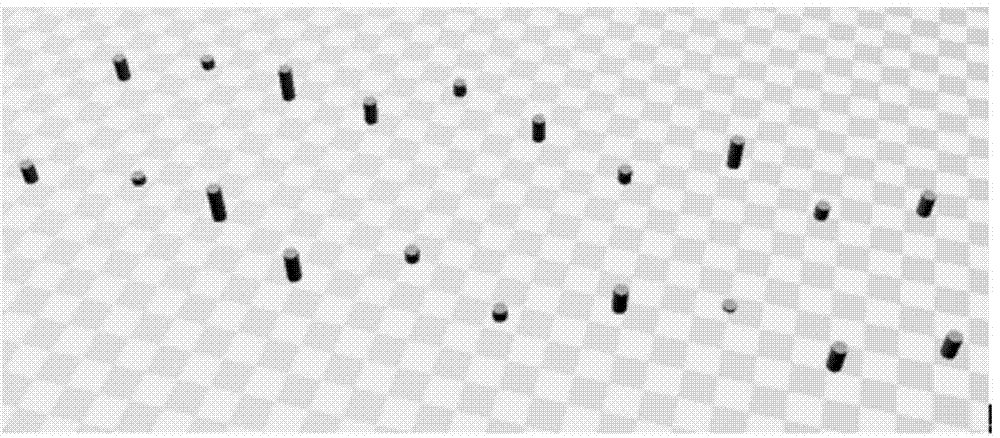
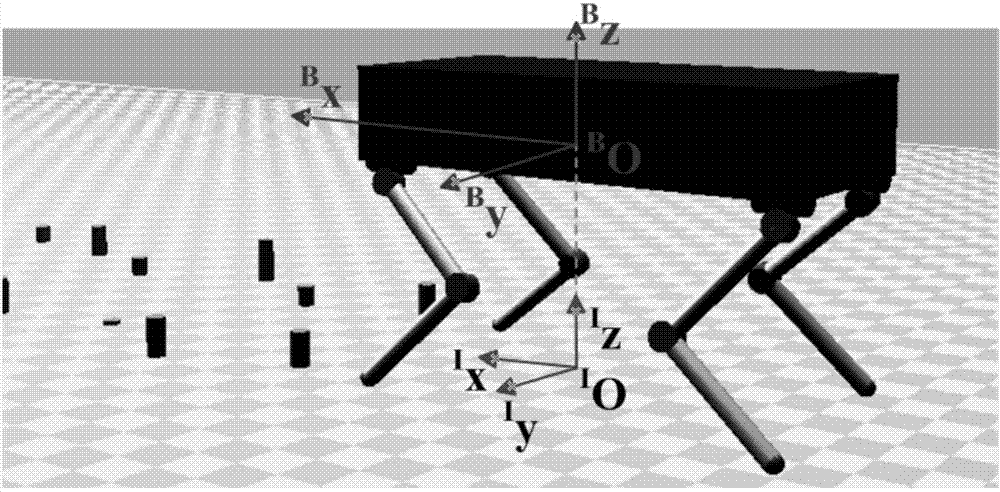
[0027] by figure 1 The twelve-degree-of-freedom quadruped robot shown by figure 2 Taking the rough terrain shown as an example, the method for generating the free gait of a quadruped robot is described in detail. image 3 is the state of the quadruped robot at the initial position, the coordinate system {B} is the body coordinate system, and its origin coincides with the center of gravity of the robot, and the coordinate system {I} is the initial coordinate system, and its origin is located on the horizontal ground.
[0028] The free gait generation method in the present invention is proposed based on two assumptions. First, the mass distribution of the robot torso is uniform, and the center of gravity of the robot coincides with the geometric center of the torso; second, all points in the terrain that are suitable for the robot’s feet are known in advance, and the coordinates of these points in the coordinate system {I} are given :
[0029] P = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More