

Obstacle pose determination method and device, equipment and medium
A technology of obstacle and pose, which is applied in the field of determination of obstacle pose, can solve problems such as inaccurate estimation of point cloud obstacle pose, influence on pose estimation, and inability to accurately determine obstacle pose information, etc., to achieve The effect of simplifying the determination process, improving accuracy, and avoiding the problem of inaccurate pose estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The specific implementations of the method, device, equipment and medium for determining the obstacle pose provided by the embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
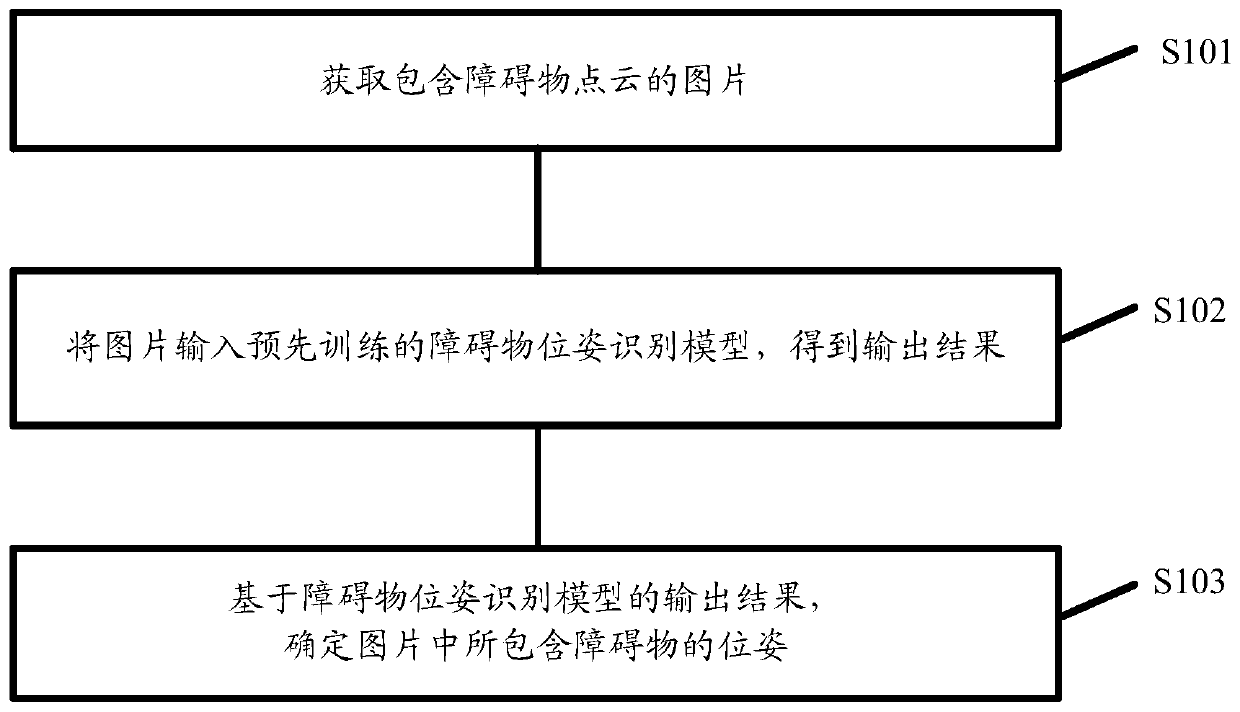
[0044] Such as figure 1 As shown, the embodiment of the present invention provides a method for determining the pose of an obstacle, including the following steps:
[0045] S101. Acquire a picture containing an obstacle point cloud.
[0046] During the specific implementation, the 3D point cloud data containing obstacles is collected by lidar, and the point cloud data of the road surface is filtered out from the 3D point cloud data, and the obstacle point cloud data is filtered out, and then the obstacle point cloud data is mapped on the bird's-eye view. In the coordinate system of the figure, two-dimensional point cloud data containing obstacles is generated, and based on the two-dimensional point cloud data, a picture containing p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More