

Point cloud data denoising method and device, equipment and storage medium
A technology of point cloud data and cloud data, which is applied in image data processing, character and pattern recognition, instruments, etc. It can solve the problem of large amount of denoising operations in the whole frame, high delay in the obstacle perception process, and difficulty in accurately removing floating point cloud data. Noise and secondary reflection noise, etc., to achieve the effect of improving accuracy and efficiency, improving accuracy and real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example
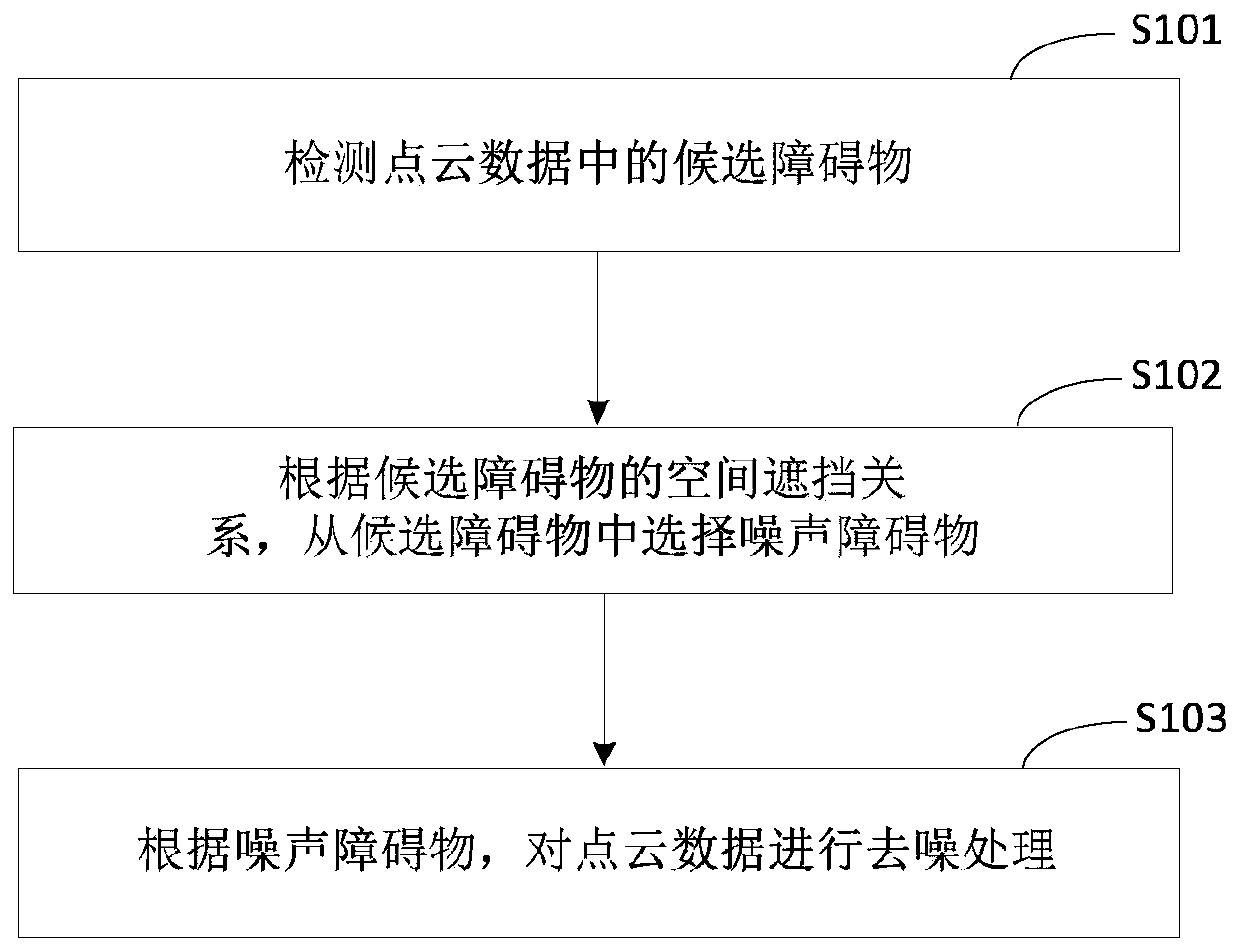
[0059] figure 1 It is a flow chart of a point cloud data denoising method according to the first embodiment of the present application. This embodiment is applicable to the case of denoising point cloud data, especially for removing floating noise and secondary reflection noise. The method can be performed by a point cloud data denoising device, which is implemented in the form of software and / or hardware, and can be preferably configured in a radar-carrying device, for example, a self-driving vehicle equipped with a radar, or a mobile robot, etc. . Such as figure 1 As shown, the method specifically includes the following steps:
[0060] S101. Detect candidate obstacles in point cloud data.
[0061] In this application, point cloud data may be a collection of three-dimensional coordinate vectors recorded in the form of point clouds by radar scanning the scene where it is located, and each three-dimensional coordinate vector may be represented by (x, y, z). In addition, th...
no. 2 example
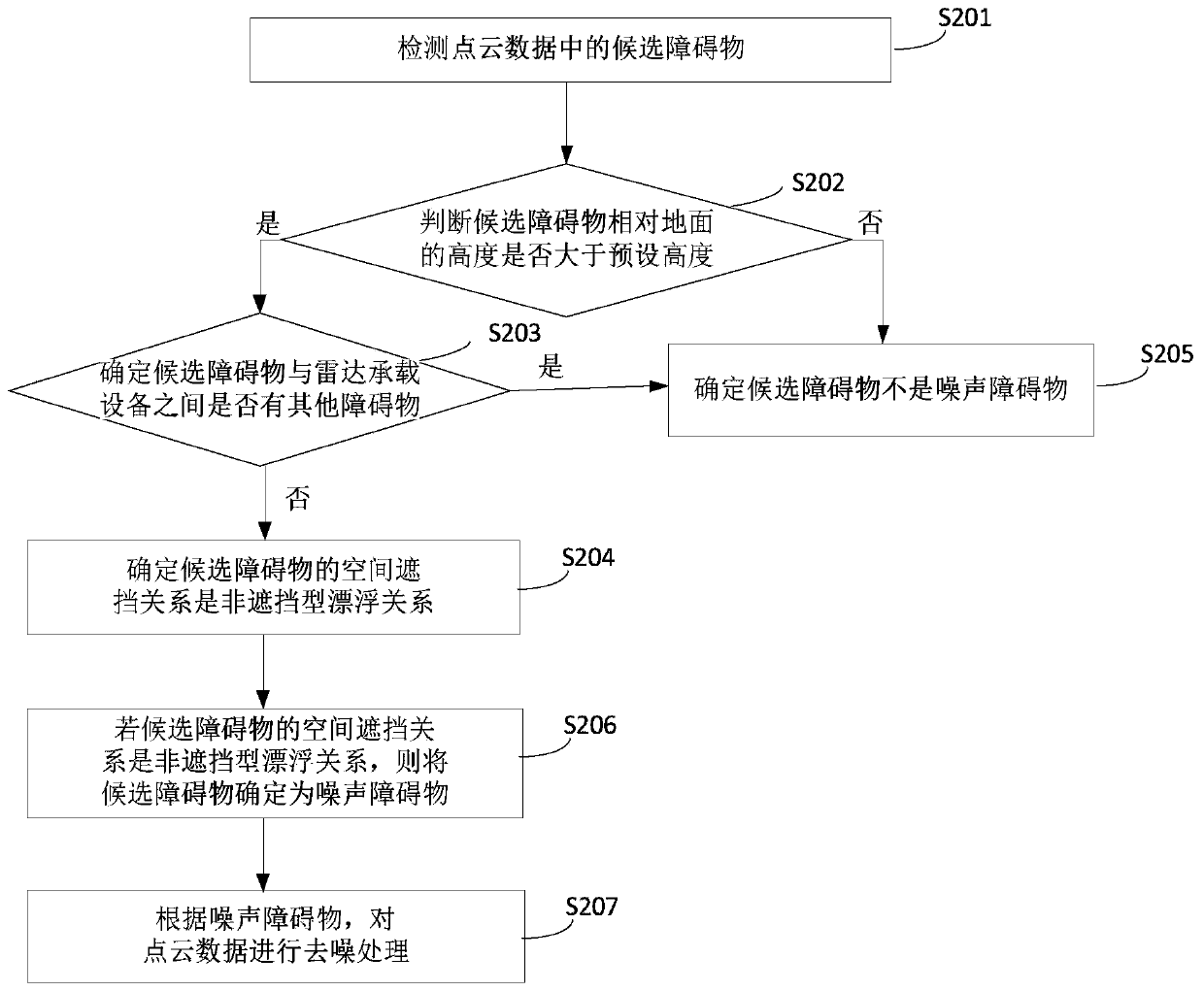
[0073] Figure 2A is a flow chart of a point cloud data denoising method according to the second embodiment of the present application, Figure 2B-2C is a schematic diagram of judging the spatial occlusion relationship of candidate obstacles according to the second embodiment of the present application. This embodiment is further optimized on the basis of the foregoing embodiments, and provides a possible implementation manner of determining the spatial occlusion relationship of candidate obstacles. Specifically, the specific situation of determining whether a candidate obstacle is a non-occlusion floating relationship is given. Such as Figures 2A-2C As shown, the method may specifically include:
[0074] S201. Detect candidate obstacles in point cloud data.
[0075] S202, judging whether the height of the candidate obstacle relative to the ground is greater than a preset height, if yes, execute S203, if not, execute S205.
[0076] Optionally, the embodiment of the prese...
no. 3 example
[0093] Figure 3A is a flow chart of a point cloud data denoising method according to the third embodiment of the present application, Figure 3B is a schematic diagram of judging the spatial occlusion relationship of candidate obstacles according to the third embodiment of the present application. This embodiment is further optimized on the basis of the foregoing embodiments, and provides an implementable manner of determining the spatial occlusion relationship of candidate obstacles. Specifically, the specific situation of determining whether the candidate obstacle is a full occlusion relationship is given. Such as Figure 3A-3B As shown, the method may specifically include:
[0094] S301. Detect candidate obstacles in point cloud data.
[0095] S302. Determine reference obstacles of candidate obstacles.
[0096] Wherein, the reference obstacle may be an obstacle appearing between the radar bearing device and the candidate obstacle within the radar viewing angle. It sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More