

MSCKF-based visual inertiaodometerwith online time calibration function
A time calibration and odometer technology, applied in the field of positioning and navigation, can solve the problems of VIO algorithm performance degradation, failure, time out of synchronization, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
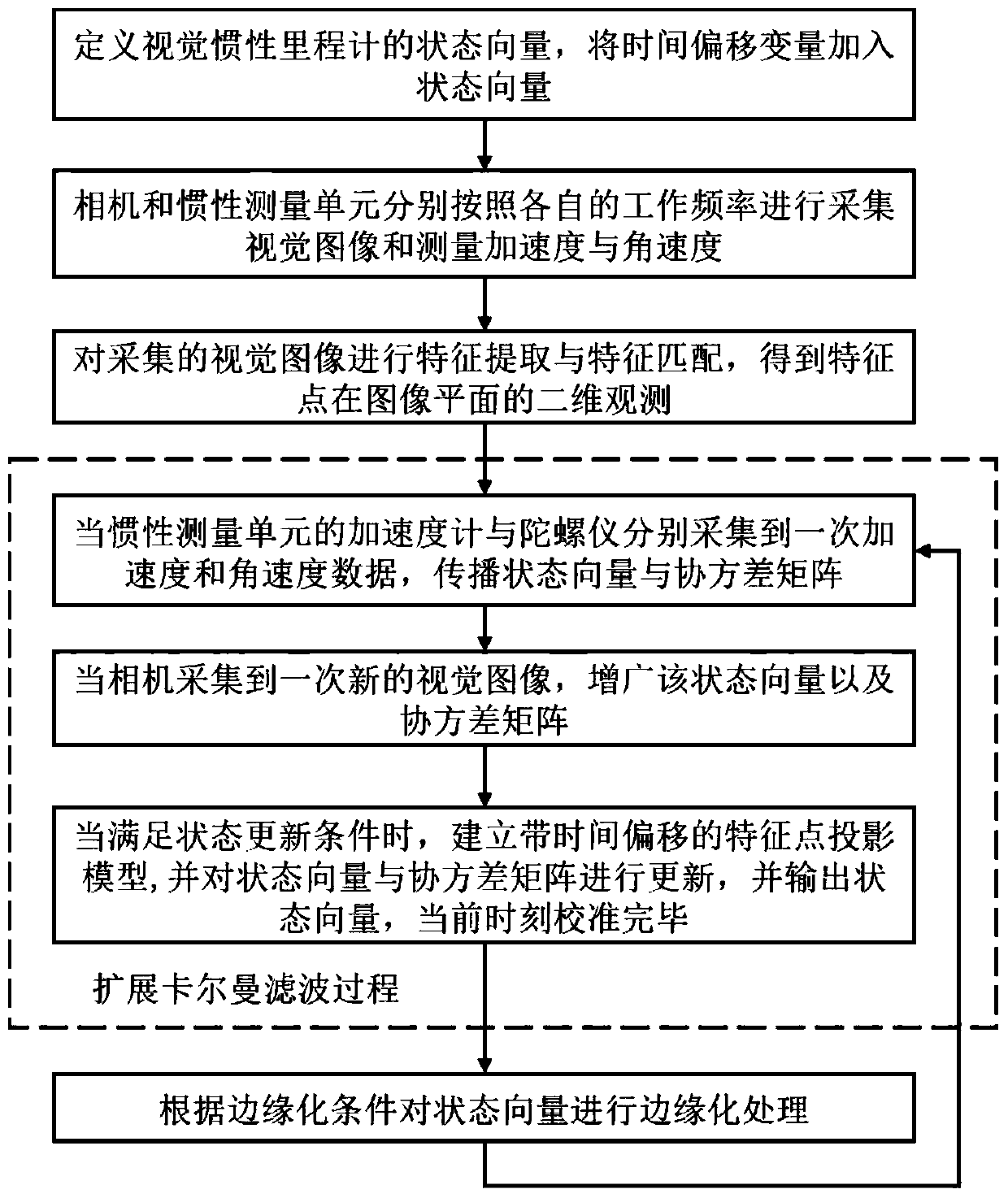
[0052] The present invention proposes an MSCKF-based visual-inertial odometer with online time calibration, which will be further described in detail in conjunction with specific embodiments below.
[0053] The present invention proposes a visual-inertial odometer based on MSCKF with online time calibration, and the visual-inertial odometer performs the following steps:
[0054] 1) Define the state vector x of the visual-inertial odometer VIO, and define the error state vector of the VIO Specific steps are as follows:
[0055] 1-1) Define the augmented IMU state vector as where the superscript T represents the vector transpose, x I is the IMU state vector, namely where the unit quaternion Indicates the relative rotation from the IMU coordinate system to the global coordinate system, G p I and G v I represent the position and velocity of the camera coordinate system in the global coordinate system, respectively, b g and b a Represents the random walk of the accele...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More