

SCARA robot friction model improvement and dynamical parameter identification method
A dynamic parameter and friction model technology, applied in instruments, simulators, computer control, etc., can solve the problems of insufficient torque prediction accuracy and insufficient parameter identification accuracy, so as to speed up the optimization time, improve the accuracy, and not exceed the limit. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
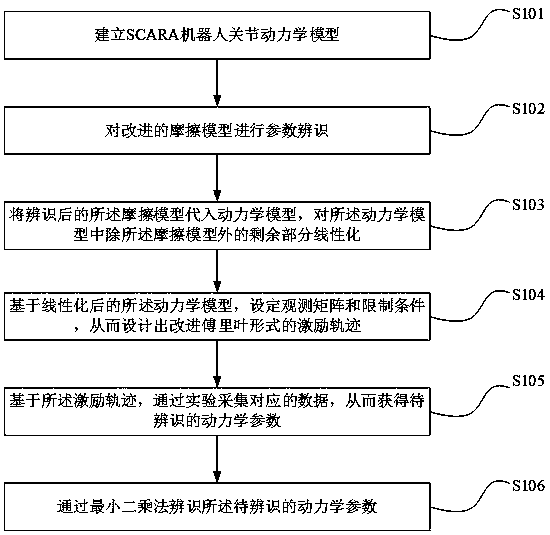
[0062] like figure 1 As shown, a friction model improvement and dynamic parameter identification method for a SCARA robot, including:
[0063] S101: establishing a joint dynamics model of the SCARA robot;
[0064] S102: Perform parameter identification on the improved friction model;
[0065] S103: Substituting the identified friction model into a dynamic model, and linearizing the rest of the dynamic model except the friction model;
[0066] S104: Based on the linearized dynamics model, set an observation matrix and restriction conditions, so as to design an excitation trajectory in an improved Fourier form;
[0067] S105: Based on the excitation trajectory, colle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More