

A 6D Pose Estimation Method for Indoor Target Objects Based on Enhanced Autoencoder
An autoencoder and target object technology, which is applied in the field of 6D pose estimation of indoor target objects based on enhanced autoencoders, can solve problems such as excessive subsequent processing, poor occlusion resolution, and difficulty in dealing with symmetrical objects and occluded objects, etc. Achieving the effect of rich texture features and strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0099] In order to make the technical solution of the present invention clearer, the content of the invention will be described in more detail below in conjunction with the examples, but the scope of protection of the invention is not limited to the following examples, all the features disclosed in this specification, or all methods disclosed or steps in a process, may be combined in any way, except for mutually exclusive features and / or steps.
[0100] The principle will be further described below in conjunction with the accompanying drawings.
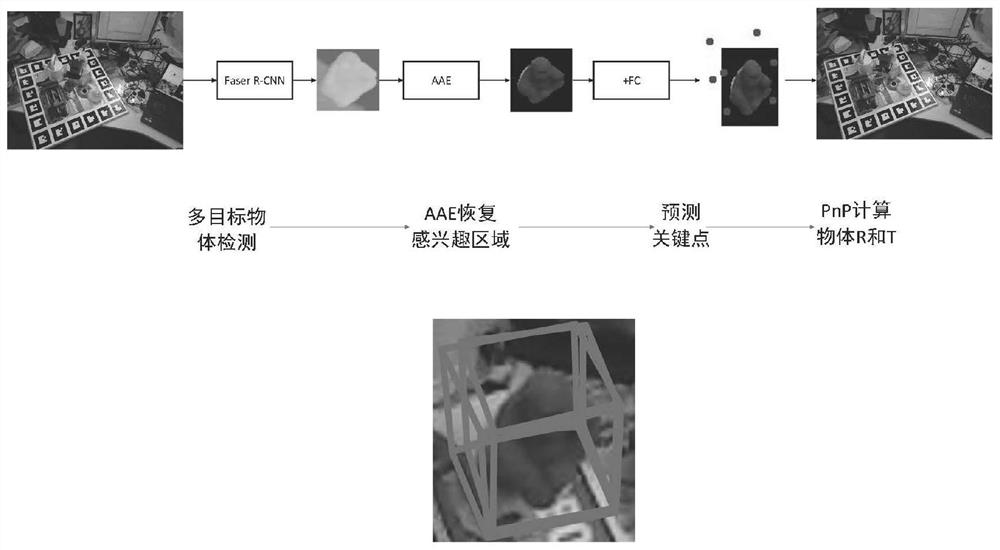
[0101] Such as figure 1 Shown is the overall flowchart of the method proposed by the present invention, which is displayed in the form of realization effect. Taking the Ape ape category in Linemod as an example, the specific operation steps are:
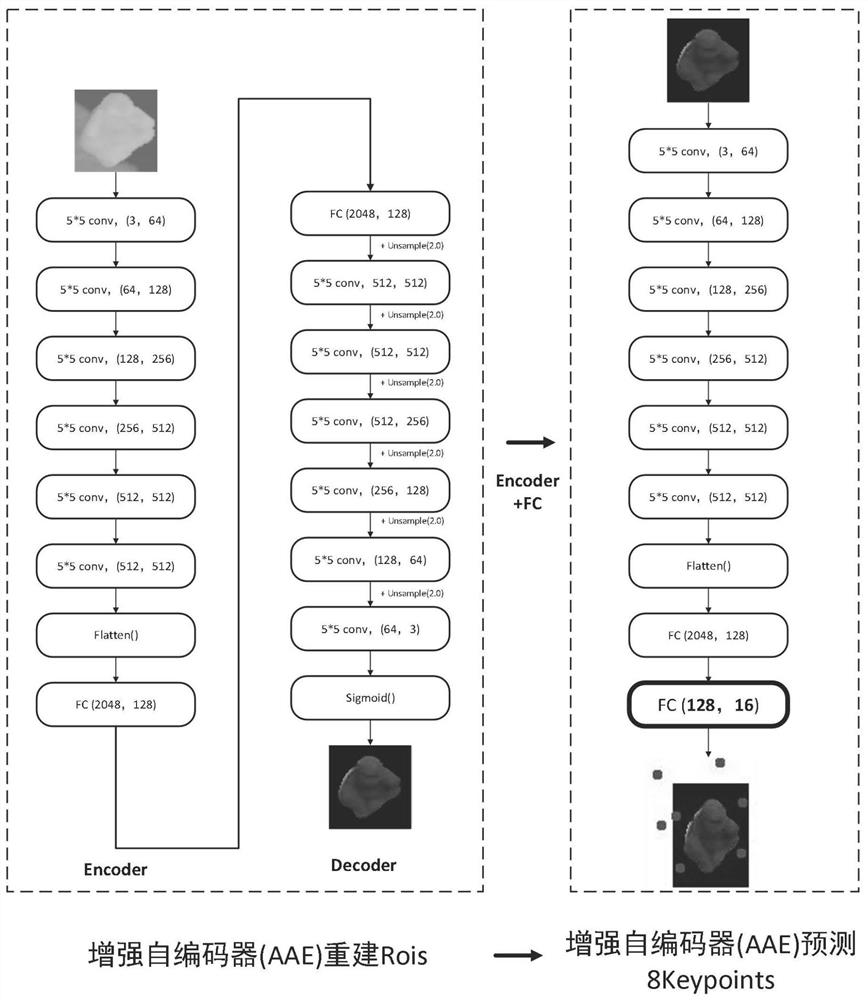
[0102] A method and system for estimating the 6D pose of an indoor target object based on an enhanced self-encoder. The method is divided into three stages: the multi-target object detectio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More