

Force/position compliance control method for industrial robots based on dynamic parameter identification
A technology of dynamic parameters and industrial robots, applied in the field of control, can solve problems such as difficult to verify the controller, lack of actual experiments, etc., and achieve the effect of achieving physical feasibility
Active Publication Date: 2021-02-05
HUAZHONG UNIV OF SCI & TECH
View PDF8 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0008] In the prior art, the force / position compliance control algorithm mostly proves the performance of the controller through theoretical analysis or simulation. It only verifies the ideal situation and lacks actual experiments. Therefore, it is difficult to verify the design in the actual operation of industrial robots. The controller can adjust external force and position error to realize active and compliant control
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment
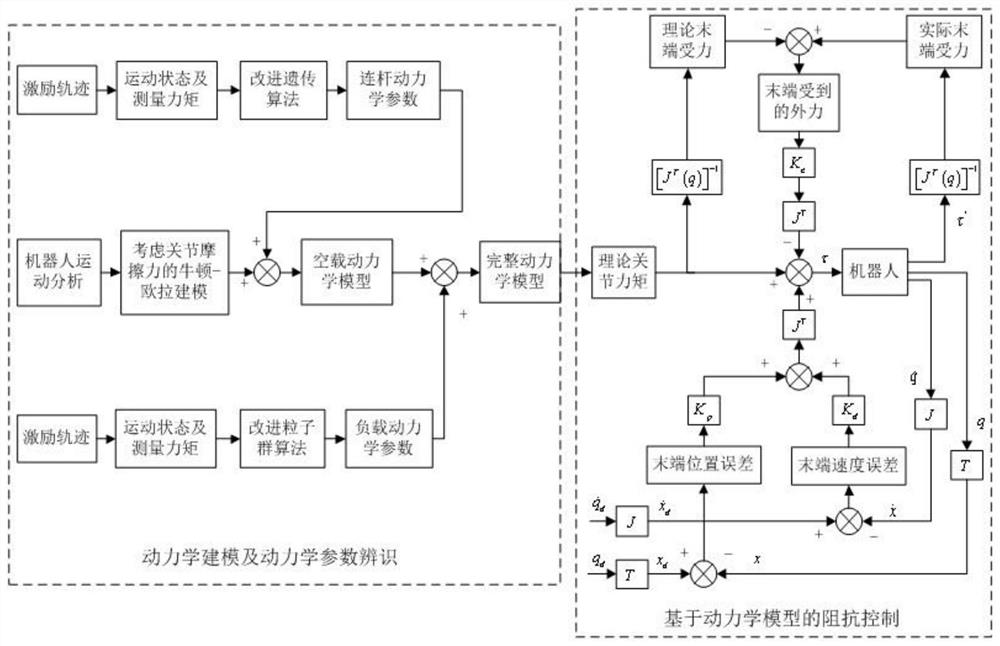
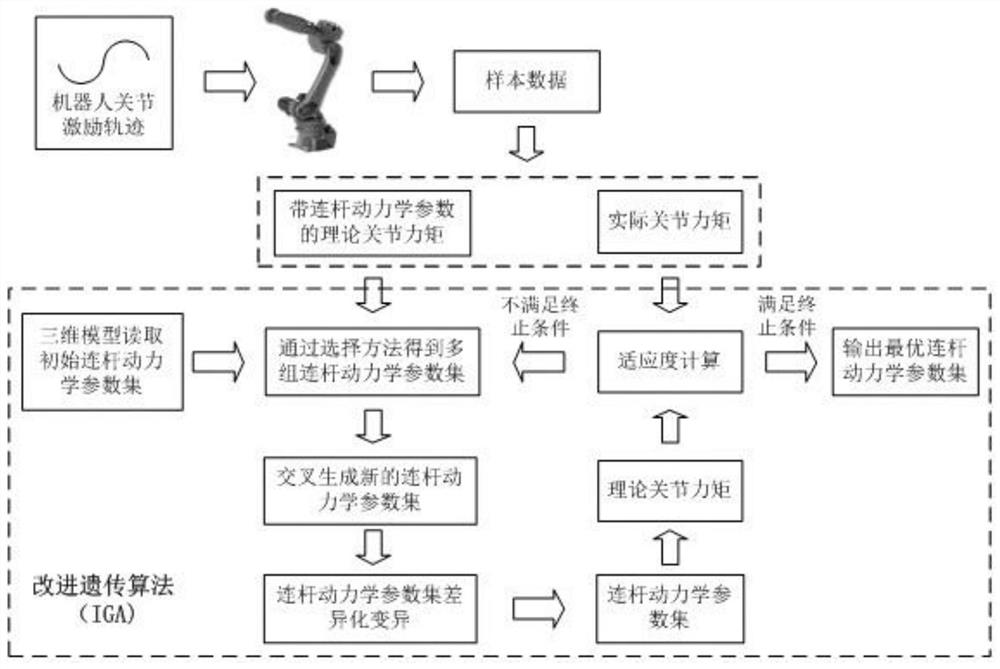
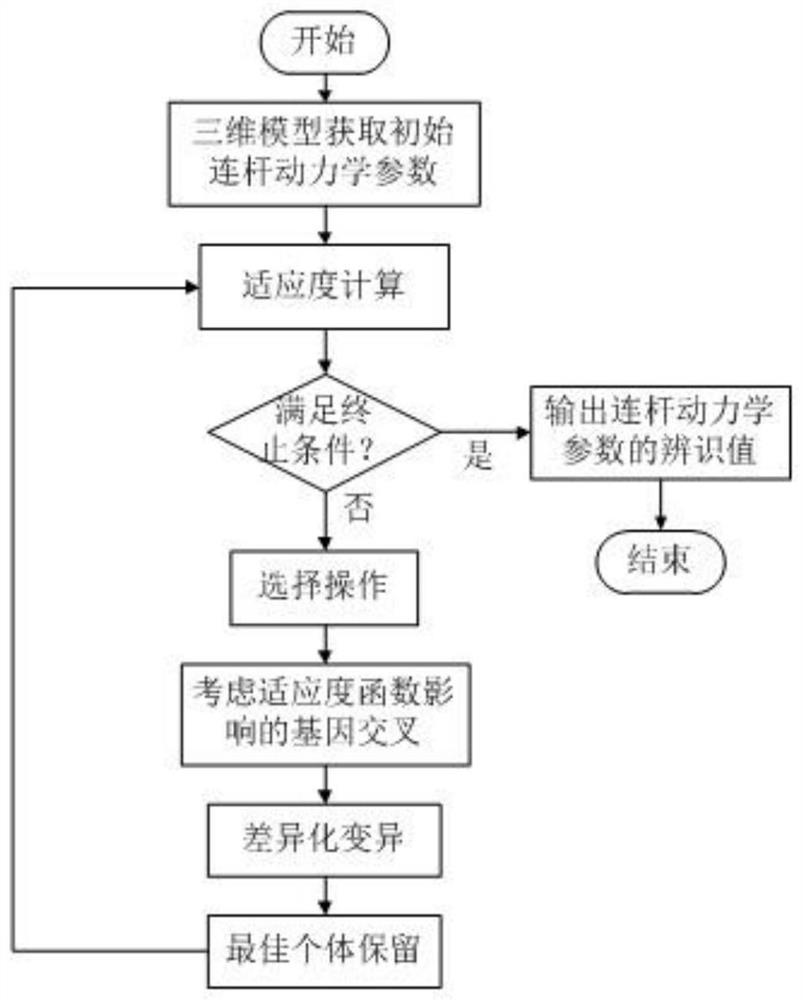
[0128] The present invention verifies the practicability of the proposed dynamic parameter identification algorithm and force / position compliance control algorithm through experiments, introduces the experimental platform of six-link industrial robot and designs the experimental schemes respectively, and verifies the proposed improved genetic algorithm through experiments And improve the practicability and reliability of the particle swarm algorithm identification, thus constructing an accurate and complete dynamic model, and on this basis, the compliance effect of the impedance controller based on the dynamic model on the end force and position is confirmed.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention discloses a force / position compliance control method for an industrial robot based on dynamic parameter identification, comprising the following steps: constructing a dynamic equation with a friction force model by using the Newton-Euler method; Based on the identified complete dynamic model, an impedance control algorithm is proposed to realize force / position compliance control; the link dynamics parameters and load dynamics parameters are identified through the robot experimental platform, and the impedance control algorithm is carried out. verify. The invention realizes the force / position compliance control of the end of the industrial robot, identifies the dynamic parameters of the connecting rod and the dynamic parameters of the load through the six-link robot experimental platform, and verifies the impedance control algorithm. The maximum position error is 0.05mm, which confirms the practicability and reliability of the dynamic model-based impedance controller.
Description
technical field [0001] The invention belongs to the technical field of control and relates to industrial robots, in particular to a force / position compliance control method for industrial robots based on dynamic parameter identification. Background technique [0002] Industrial robots are often used in complex tasks such as grinding, assembly, and polishing that require interaction with the environment. If only the position error is simply controlled, it may cause the end torque to exceed the limit or damage the workpiece. Therefore, in addition to the conventional position control when in contact with the environment, it is necessary Adjust the size of the contact force to achieve the flexibility of the end force and position during operation. [0003] In the force / position compliance control, the robot needs to obtain accurate external force to balance the relationship between the end force and the position. According to the different acquisition methods of the external fo...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): B25J9/16
CPCB25J9/1602
Inventor宋宝唐小琦周向东徐意陈天航饶阿龙肖千红田勇
OwnerHUAZHONG UNIV OF SCI & TECH