

Underwater robot attitude control method based on reinforcement learning
An underwater robot, reinforcement learning technology, applied in attitude control, adaptive control, general control system and other directions, can solve problems such as slow convergence speed, achieve the effect of improving control accuracy, overcoming uncertainty, and ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0042] The underwater robot attitude control method based on reinforcement learning described in the present invention combines the policy gradient algorithm and the reinforcement learning algorithm of the support vector machine, first builds the underwater robot model and reward function based on the Markov sequence, introduces prior knowledge, Using SVM as a function approximator, the optimal strategy is found, and finally the controller through reinforcement learning is applied to the underwater robot system.
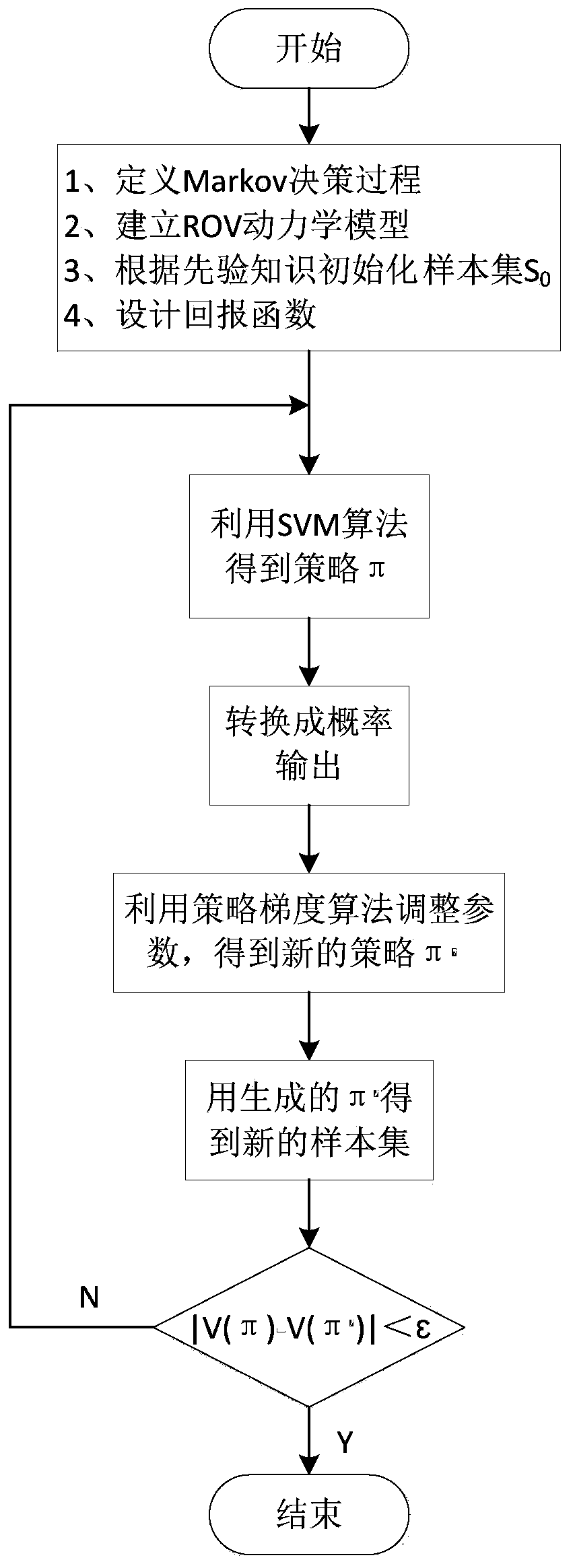
[0043] like figure 1 As shown, the underwater robot attitude control method based on reinforcement learning of the present invention comprises steps:
[0044] (1) Construct the underwater robot dynamics model and reward function based on the Markov sequence;
[0045] Markov decision process (Markov Decision Process...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More