

Multi-underwater-robot cooperative ocean current estimation method
An underwater robot and ocean current technology, applied in the directions of instruments, fluid velocity measurement, sound wave re-radiation, etc., can solve the problems of positioning position velocity divergence, etc., and achieve the effect of increasing equipment cost, clear logic, and improving navigation ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0020] The present invention will be further described in detail below in conjunction with the accompanying drawings.
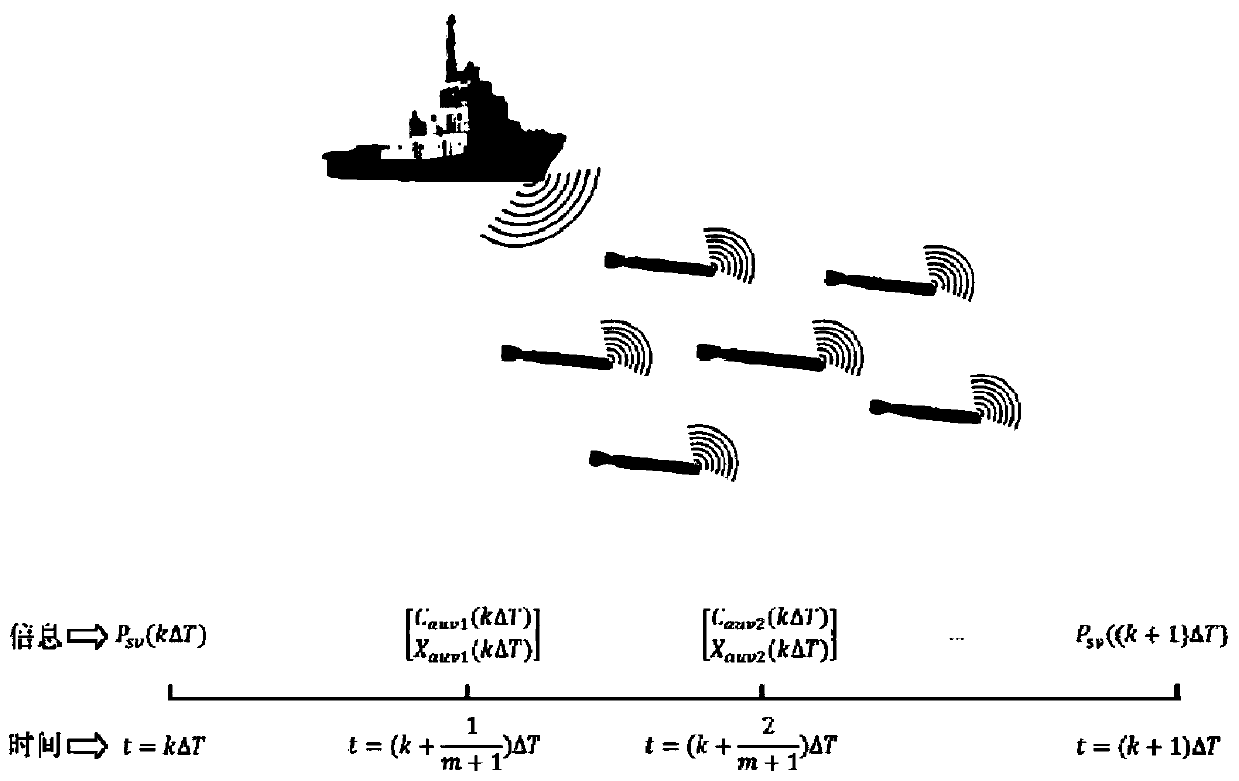
[0021] A collaborative ocean current estimation method for multiple underwater robots includes a Doppler velocimeter module, an underwater acoustic synchronous communication module, a nonlinear estimation module, and a cooperative formation control module.
[0022] Doppler velocimeter module: Doppler velocimeter (120kHz) has a typical seafloor measurement range of about 300-400 meters. When the water depth exceeds the measurement range and cannot achieve bottom speed measurement, it can automatically switch to convection speed measurement mode.
[0023] Underwater Acoustic Synchronous Communicator module: Under typical marine environment, the communication range of the underwater acoustic synchronous communication machine is not less than 3km, and it has a high-precision crystal oscillator of 1PPM. Based on the communication function, it can realize One Way TravelTim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More