Point-to-point iterative learning optimization control method of motor-driven single mechanical arm system
A motor-driven, single-arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of not fully utilizing the degree of freedom of non-tracking time points to design controllers, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0125] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
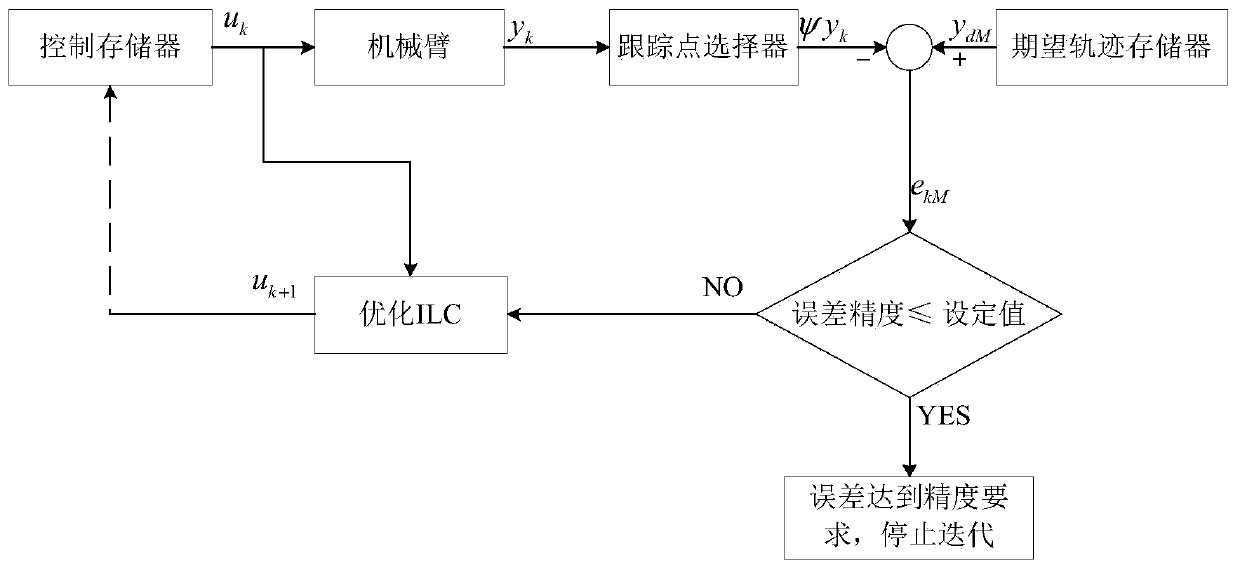
[0126] combine Figure 1-Figure 8 shown, please refer to figure 1 , which shows a model block diagram of the motor-driven single manipulator control system disclosed in the present application. The controller input for batch k is u k , acting on the manipulator can get the actual output y of the kth batch of the system k , the actual output at the specified tracking point can be obtained through the tracking point selector, and the error between it and the set expected value stored in the expected track memory is passed to e kM , the error is compared with the set precision value, if the error does not reach the set precision, the error e kM with current controller input u k Pass to the optimized iterative learning controller to generate the next batch of controller inputs u k+1 , so that the loop runs until the error between the actua...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



