

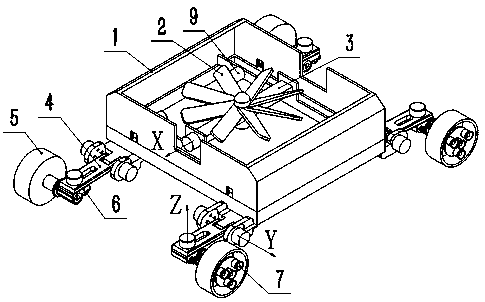
Wheel-foot conversion type obstacle-surmounting wall-climbing robot and obstacle-surmounting method thereof
A wall-climbing robot and conversion technology, applied in the field of wall-climbing robots, can solve the problems of poor obstacle-crossing ability and low walking efficiency, and achieve the effects of strong obstacle-breaking ability, high walking efficiency, and small turning radius
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0032] Specific implementation mode one: combine Image 6 This embodiment will be described. like Figure 6-1 As shown, when the wall-climbing robot encounters an obstacle that can be circumvented while traveling, the specific steps for the robot to overcome the obstacle with a right-angled fold line include:
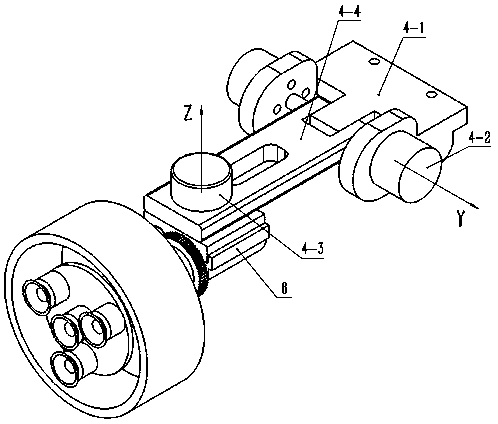
[0033] Step 1, the first wheel 5-1, the second wheel 5-2, the third wheel 5-3, and the fourth wheel 5-4 are driven by their respective wheel steering motors 4-3, rotate 90° around the Z axis, and after turning The direction of travel of the wheels is parallel to the small cube obstacle 8, and the direction of the wheels after turning is as follows: Figure 6-2 shown;
[0034] Step 2, the wall-climbing robot moves to avoid obstacles, such as Figure 6-3 shown;
[0035] Step 3, the first wheel 5-1, the second wheel 5-2, the third wheel 5-3, and the fourth wheel 5-4 are driven by their respective wheel steering motors 4-3, and rotate 90° in the opposite direction arou...
specific Embodiment approach 2
[0037] Specific embodiment two: When running into an obstacle that can be circumvented, by controlling the wheel steering motor 4-3 in the four wheel foot conversion mechanisms 4, the wheel 5 is driven to rotate a certain angle around the Z axis, and the robot can realize small Obstacle-surmounting function with radial arc omnidirectional movement.
specific Embodiment approach 3
[0038] Specific implementation mode three: combination Figure 7 This embodiment will be described.
[0039] like Figure 7-1 As shown, when the robot encounters an obstacle that needs to be rolled over, the specific steps for overcoming the obstacle include:
[0040] Step 1, control the wheel-foot conversion motor 4-2 in the four wheel-foot conversion mechanism 4 to drive the crossbeam 4-4 to rotate 90° around the Y axis, and complete the adduction of the four wheels 5 relative to the frame 1, such as Figure 7-2 shown;
[0041] Step 2, sequentially control the wheel steering motors 4-3 in the four conversion mechanisms 4, and drive the wheels 5 to rotate 90° around the Z axis, so that the sucker group 7-1 in the wheels 5 is in vertical contact with the wall, realizing the wheel movement of the wall-climbing robot. Foot conversion functions such as Figure 7-3 shown;
[0042] Step 3, start the vacuum air pump 9 installed on the robot frame 1, make the suction cup group 7-1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More