

Automobile driving force control method and electronic equipment
A control method and driving force technology, applied in the directions of engine control, electrical control, mechanical equipment, etc., can solve the problem that the torque of the automobile engine cannot accurately adapt to the driving needs of the driver, and achieve the effect of accurately adapting to the driving needs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
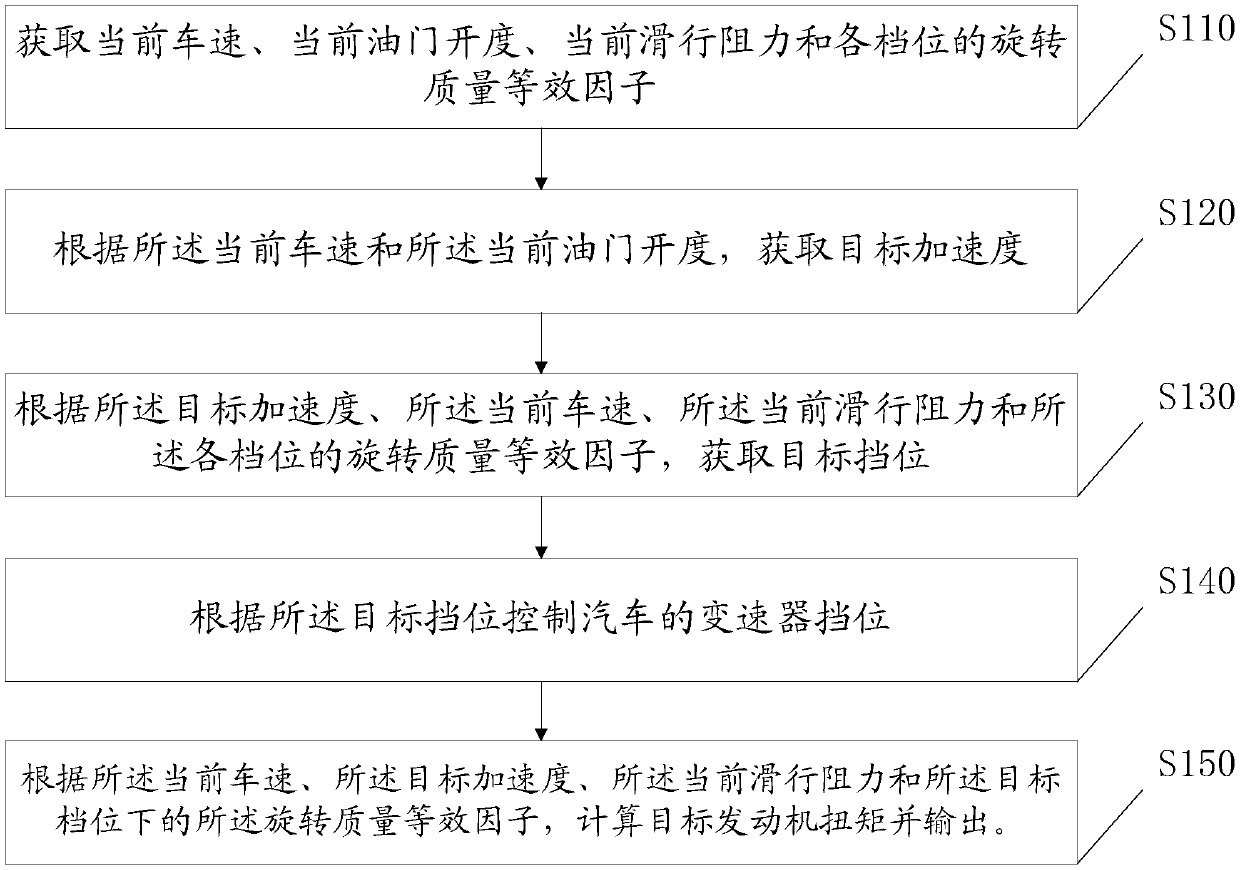
[0079] see figure 1 , figure 1 It is a flowchart of a vehicle driving force control method provided in Embodiment 1 of the present invention. Specifically, this embodiment provides a vehicle driving force control method, including:
[0080] S110. Acquiring the current vehicle speed, the current accelerator opening, the current sliding resistance, and the rotational mass equivalent factors of each gear;
[0081] Among them, the current vehicle speed refers to the speed at which the vehicle is running when the vehicle has not yet output the target engine torque; the target engine torque refers to the engine torque that can give the vehicle a suitable driving force to meet the driving needs of the driver; the current accelerator opening refers to the The opening of the accelerator pedal that controls the opening of the throttle valve to output the target engine torque; the current sliding resistance refers to the resistance that the car encounters when the car has not output th...
example 1
[0111] Example 1. Calculate the acceleration when the accelerator opening is 50% and the vehicle speed is 20km / h, 80km / h, and 100km / h:
[0112] 1) v=20km / h, then α=(-0.002×5.18-0.016)×20+5.18=4.66m / s 2 ;
[0113] 2) v=80km / h, then α=(-0.002×5.18-0.016)×80+5.18=3.0712m / s 2 ;
[0114] 3) v=100km / h, then α=(-0.002×5.18-0.016)×100+5.18=2.544m / s 2 ;
example 2
[0115] Example 2. Calculate the acceleration when the accelerator opening is 70%, and the vehicle speed is 40km / h, 60km / h, and 150km / h:
[0116] 1) v=40km / h, then α=(-0.002×7.21-0.016)×40+7.21=5.99m / s 2 ;
[0117] 2) v=60km / h, then α=(-0.002×7.21-0.016)×50+7.21=5.38m / s 2 ;
[0118] 3) v=150km / h, then α=(-0.002×7.21-0.016)×150+7.21=2.65m / s 2 ;
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More