

Obstacle avoidance method and device of robot, medium and terminal
An obstacle and robot technology, applied in the field of robotics, can solve the problem of not being able to avoid obstacles well
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] In order to make the objectives, technical solutions, and beneficial technical effects of the present invention clearer and clearer, the present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described in this specification are only for explaining the present invention, not for limiting the present invention.
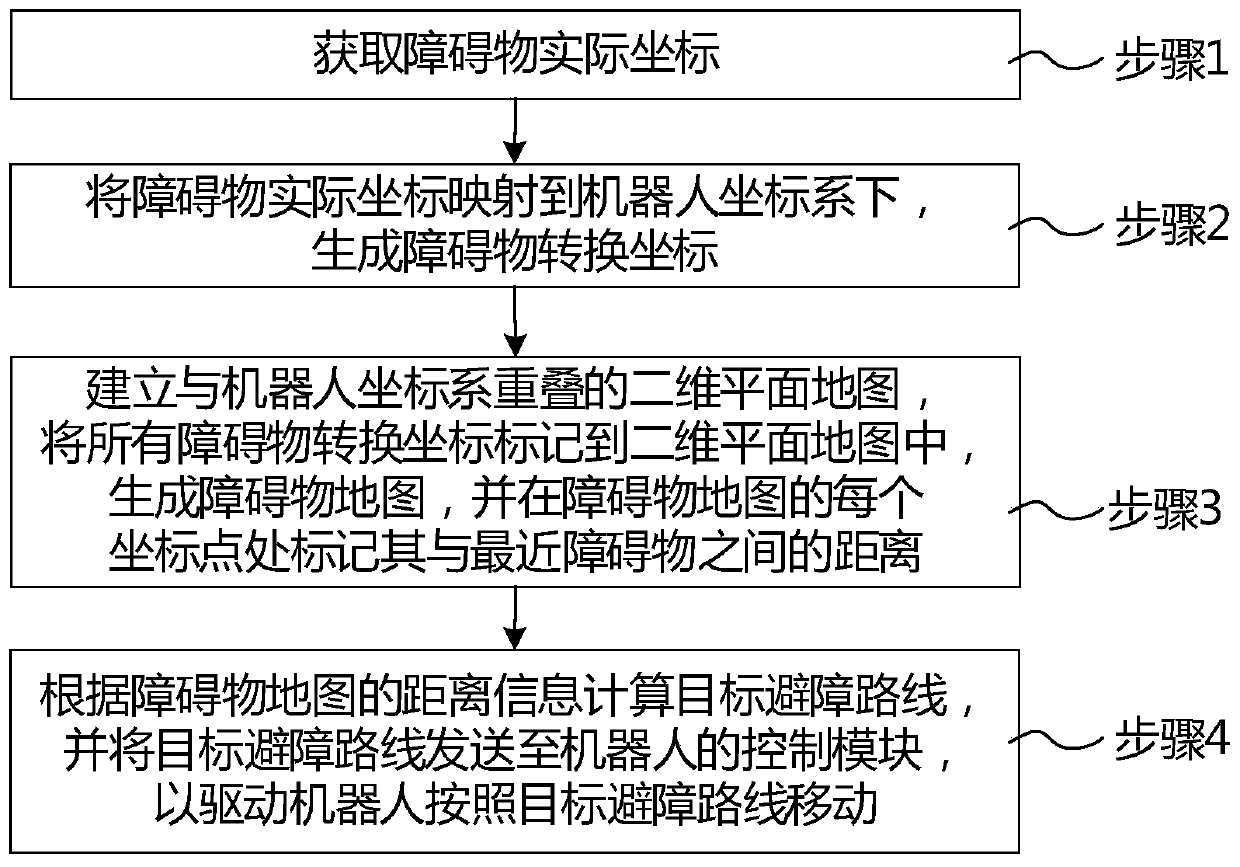
[0037] figure 1 It is a schematic flow diagram of the obstacle avoidance method of the robot provided in embodiment 1, such as figure 1 As shown, including the following steps:
[0038] S1, obtain the actual coordinates of the obstacle;
[0039] S2, mapping the actual coordinates of the obstacle to the robot coordinate system to generate obstacle conversion coordinates;
[0040] S3. Establish a two-dimensional plane map that overlaps the robot coordinate system, mark all obstacles into the two-dimensional plane map, and generate an obstacle map...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More