

Online planning method for shimmy damping track of unmanned aerial vehicle hanging flight transportation system
A transportation system and unmanned aerial vehicle technology, which is applied in the field of online planning of the pendulum reduction trajectory of the unmanned aerial vehicle hanging flight transportation system, and can solve the problems of poor control performance and the like.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
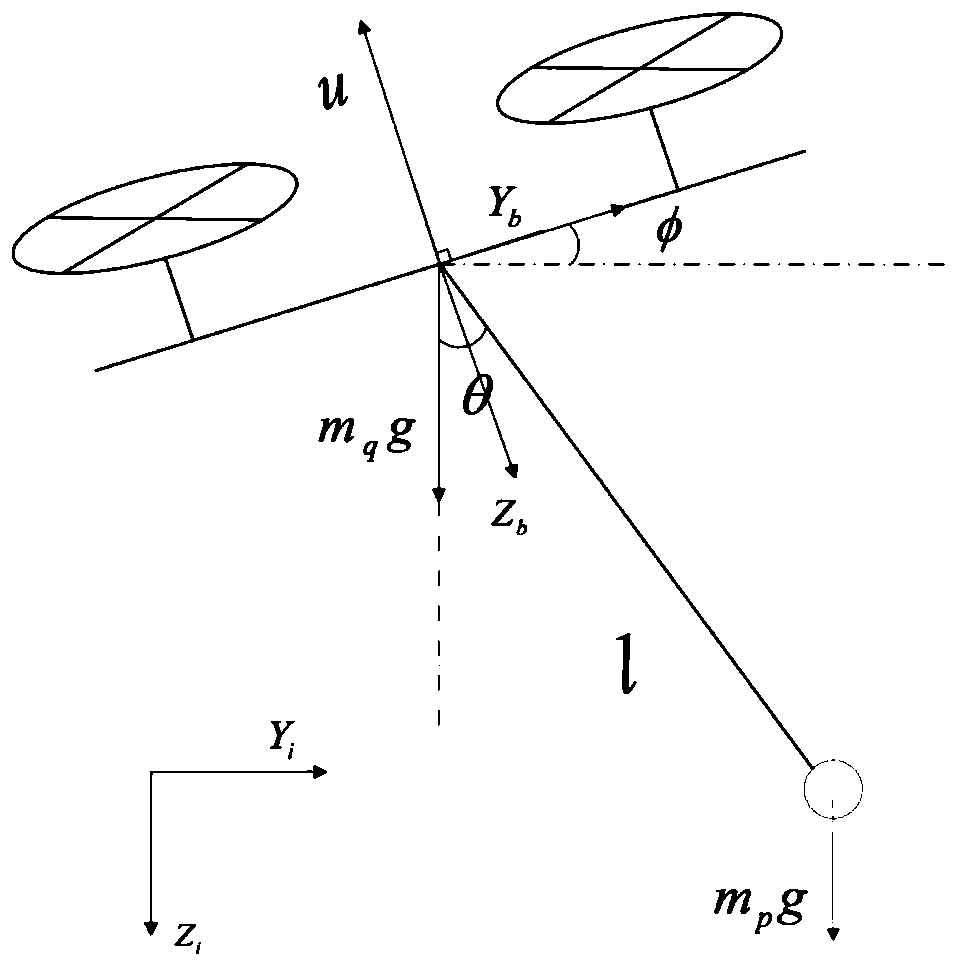
[0050] The technical problem to be solved by the present invention is to design a method for generating a swing reduction trajectory for a two-dimensional quadrotor UAV hanging flight system with underactuated characteristics, so as to realize the precise control of the UAV position and the rapid load swing. inhibition.
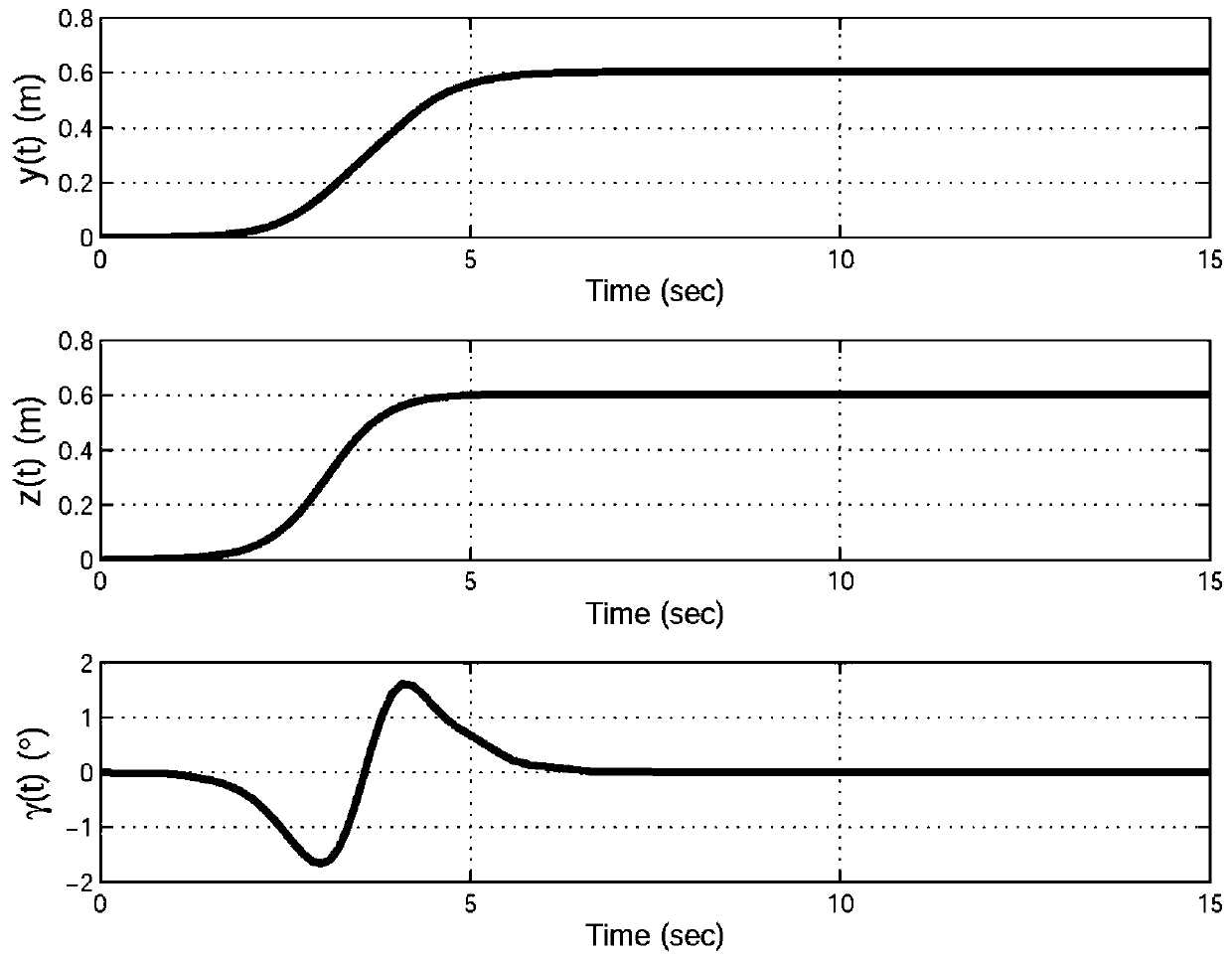
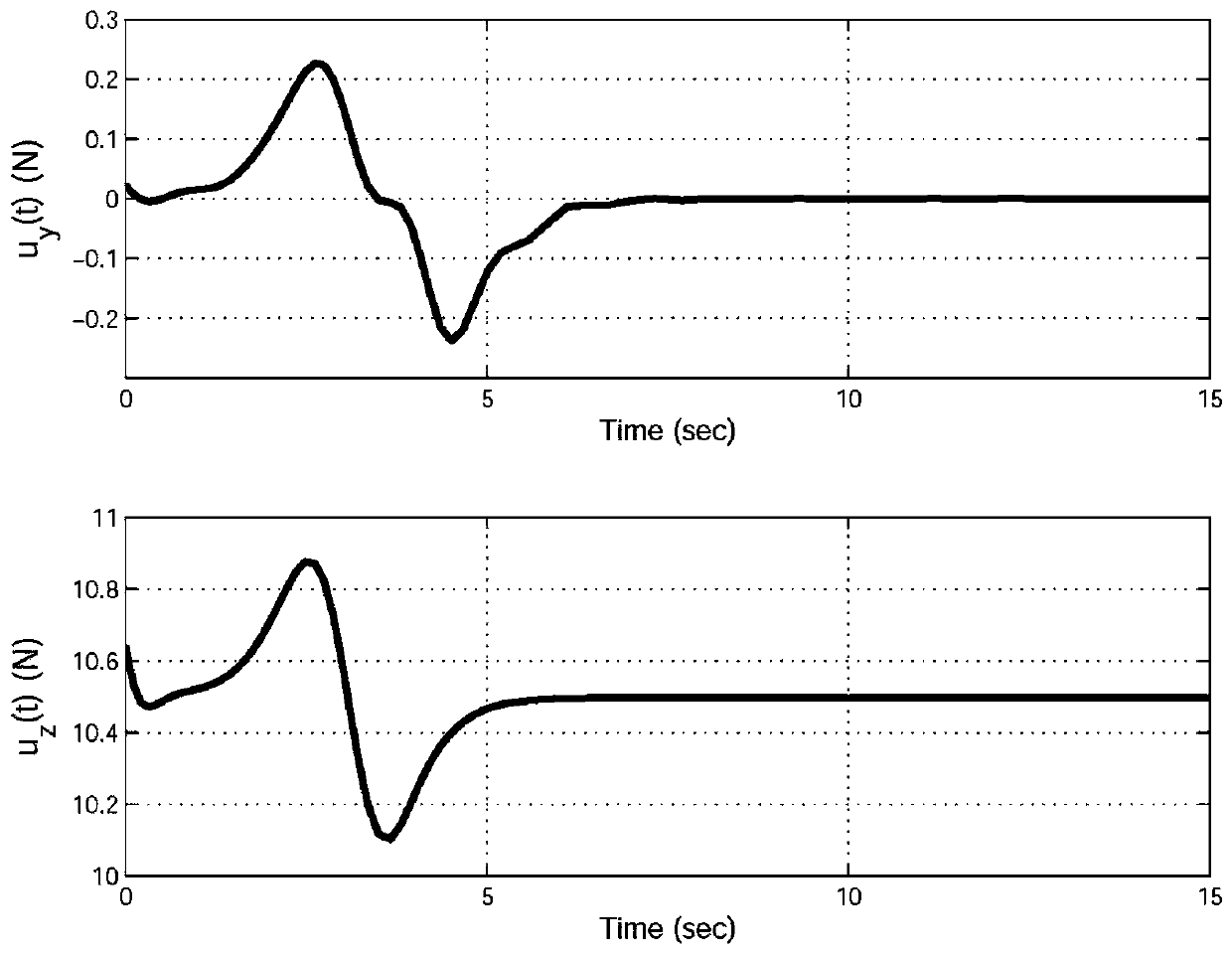
[0051] In order to overcome the deficiencies of the prior art, the present invention aims at designing a trajectory planning method for the two-dimensional four-rotor UAV hanging flight system, so as to achieve Real-time online planning simultaneously realizes the precise control of the drone's position and the rapid suppression of the load swing angle. The technical solution adopted in the present invention is to design the swing reduction trajectory of the four-rotor unmanned aerial vehicle suspension flight system, and the steps are as follows:
[0052] 1) Establish the dynamic model of the quadrotor UAV hanging flight system:
[0053] The dynamic model ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More