

Adaptive control method for four-rotor unmanned aerial vehicle suspension transportation system
A four-rotor unmanned aerial vehicle hanging, four-rotor unmanned aerial vehicle technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of stability and control at non-equilibrium points without considering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] In order to overcome the deficiencies in the prior art, the present invention aims at designing a nonlinear controller for a four-rotor UAV hanging transportation system with unknown object parameters (load mass, air damping coefficient), and simultaneously designing a parameter automatic Adaptation law, online estimation of unknown parameters, can make up for the parameter uncertainty of the system. The technical scheme adopted in the present invention is a nonlinear control method for the four-rotor unmanned aerial vehicle hanging transportation system, the steps are as follows:
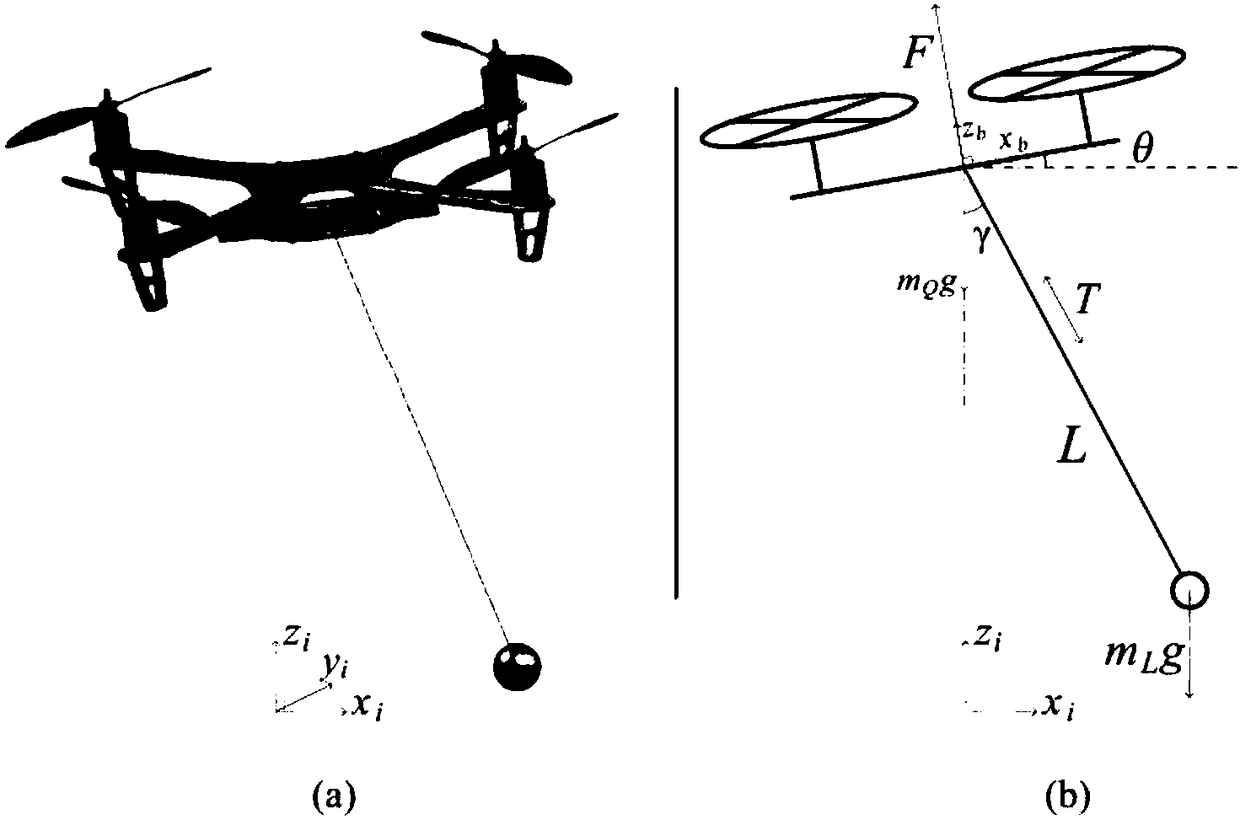
[0058] 3) Establish the dynamic model of the quadrotor UAV hanging transportation system:
[0059] The dynamic model of the two-dimensional plane model of the four-rotor UAV hanging transportation system is used, and the expression is as follows:
[0060]
[0061] The variables in formula (1) are defined as follows: Represents the state vector of the system, where y(t) is the displacem...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More