

Unmanned aerial vehicle path planning method with endpoint direction and time constraints
A time-constrained, track-planning technology, applied to navigation calculation tools and other directions, to achieve the effect of improving the problem of circumnavigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the objectives, technical solutions, and advantages of the embodiments of the present invention clearer and more specific, the present invention will be further described in detail below in conjunction with the accompanying drawings and examples of implementation.
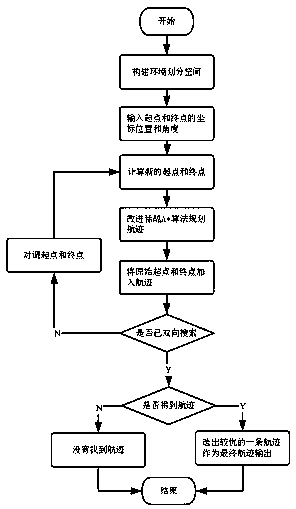
[0034] The present invention proposes a UAV track planning method with endpoint direction and time constraints, the flow chart of which is as follows figure 1 As shown, the specific steps are as follows:
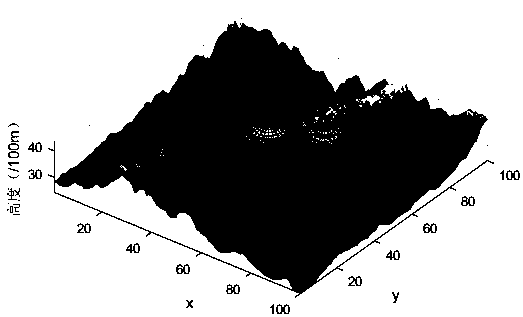
[0035] (1) Build the environment and divide the space: load the .mat terrain file, which stores the three-dimensional coordinate points of the terrain, and the maximum coordinate values in the directions of X, Y, and Z axes , , , and the number, coordinates, and minimum radius of the radar and the maximum radius , and generate the required terrain surface map, and then divide the space into regular grid units according to the minimum step size of the UAV flight, each vertex of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More