

A realization method of variable spraying banner on abb robot simulation software
A technology of simulation software and implementation method, which is applied in the direction of spraying devices, etc., and can solve the problems that the spraying process requirements cannot be met, and the performance of the spraying robot cannot be fully utilized.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
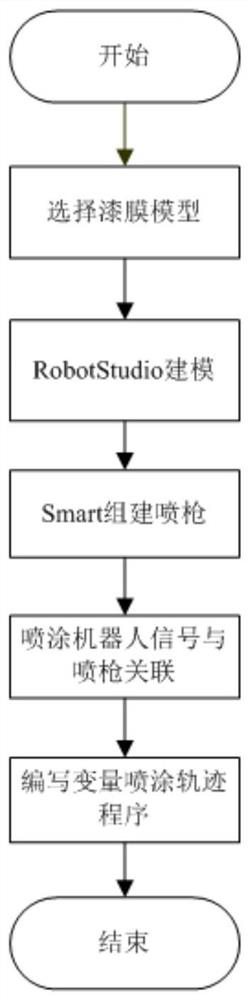
[0031] The present invention proposes a method for realizing variable spraying banners on ABB robot simulation software, such as figure 1 As shown, it includes the following steps:
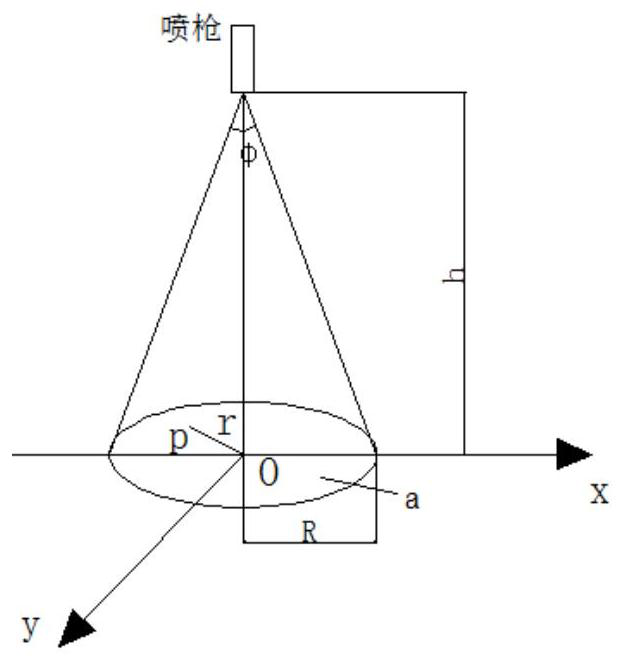
[0032] Step 1: Select a paint deposition model
[0033] With the deepening of scientists' research on paint film, there are more mature models for the rate of layer accumulation, such as β distribution model, finite range model, infinite range model, Cauchy distribution model and bivariate Gaussian distribution model, etc. The above-mentioned mature models are obtained through complicated mathematical analytical derivation, and their functions are generally smoother than those obtained by experimental methods, but the expressions are complex. The experimental method is an approximation to the actual situation, the function expression is simple, but the precision is low. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More