

A Design Method for Multi-Sensor-Based Multi-Mobile Robot Scheduling System
A mobile robot and design method technology, applied in control/regulation systems, instruments, non-electric variable control, etc., can solve problems such as increasing maintenance costs, wear of guide rails, and limiting the range of movement of robots, so as to improve dynamic coordination and stability , reduce the possibility of frontal conflict, and expand the effect of free movement range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described below in conjunction with accompanying drawing.
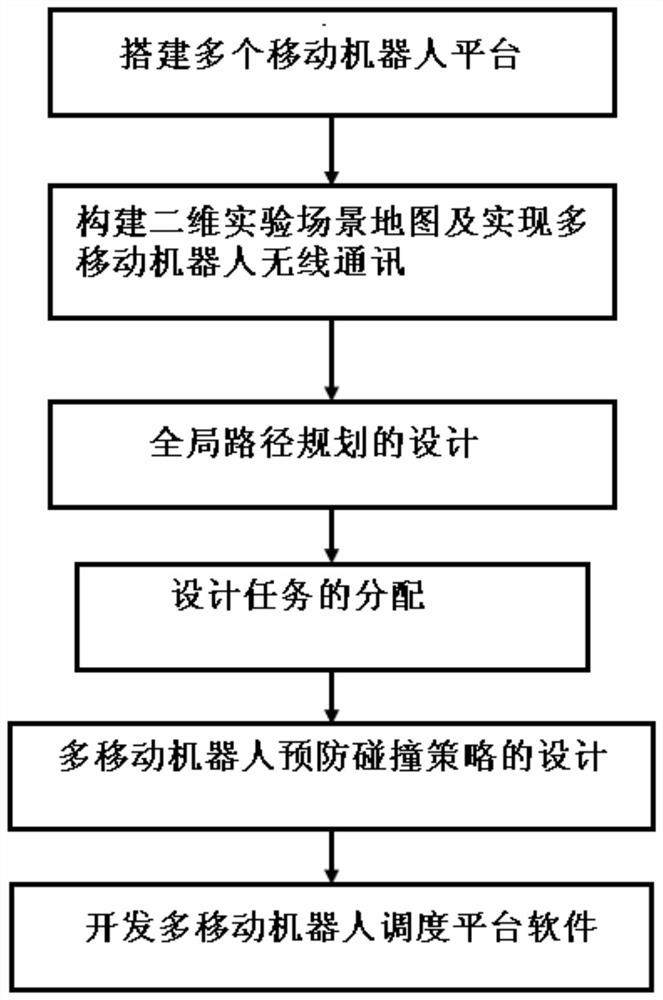
[0049] like figure 1 As shown, a multi-sensor based multi-mobile robot scheduling system design method includes the following steps:
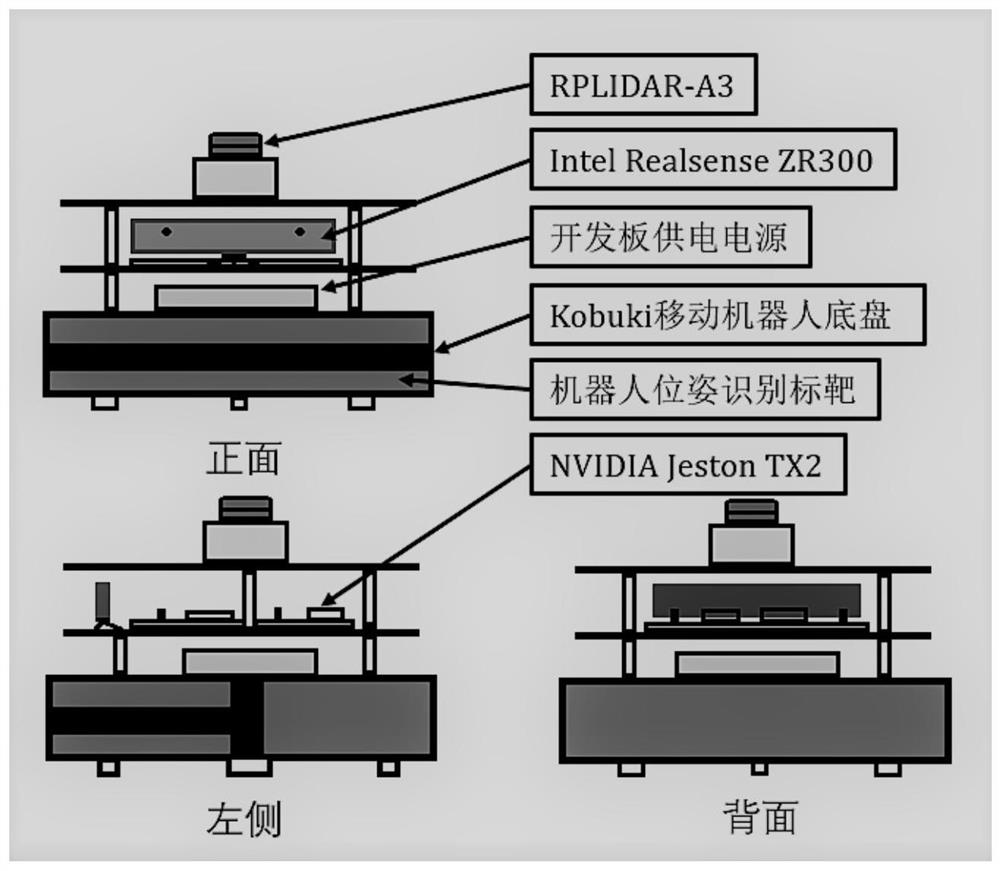
[0050] Step 1. Build multiple mobile robot platforms, and experiment with mobile robot assembly models such as figure 2 As shown, the TurtleBot2 mobile robot is used as the mobile chassis, and a red pose recognition target is set on the outer side of the mobile chassis. There are two red stripes on the front side of the red pose recognition target, that is, the front side of the robot, and the red pose recognition target There is a single red stripe on the rear side, and a blank area with a length of 1.5-1.6cm is left at the connection between the front and rear sides of the red pose recognition target; two layers of acrylic plates are set on the mobile chassis and form three layers with the mobile chassis Space, use the NVIDIA Jeston TX2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More