Omnidirectional mobile robot autonomous navigation system based on VFH* local path planning method
An autonomous navigation system, local path planning technology, applied in the direction of control/regulation system, two-dimensional position/channel control, instrument, etc., can solve the obstacles that do not explicitly consider the geometric size of the robot, are not optimal, and cannot completely ensure the robot things and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The following will describe the present invention in specific embodiments in conjunction with the accompanying drawings, so as to make the purpose, technical solutions and advantages of the present invention more clear. It should be noted that the described embodiments are only some of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
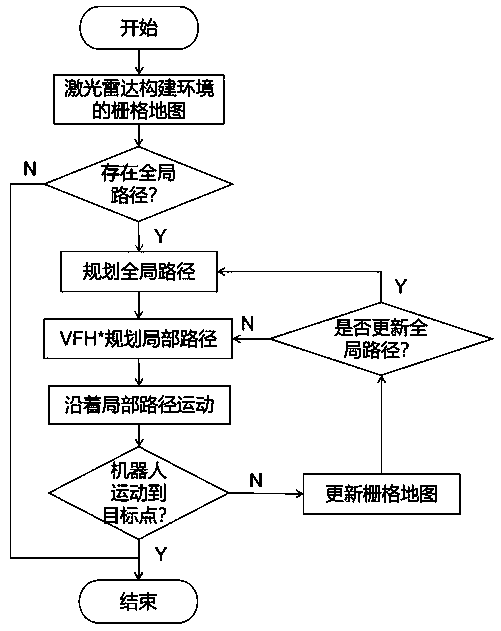
[0021] In this embodiment, an omnidirectional mobile robot autonomous navigation system based on the VFH* local path planning method is implemented. The omnidirectional mobile robot is equipped with 4 mecanum wheels that can move omnidirectionally and 1 high-precision laser Radar enables mobile robots to move in all directions, perceive the surrounding environment, and build and update grid maps.
[0022] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More