

Unmanned aerial vehicle autonomous navigation system and method based on image processing and radar
An autonomous navigation system and image processing technology, applied in the field of UAV navigation, can solve the problems of few technologies, solution application, judging flight routes and flight paths, etc., and achieve a wide range of applications, strong scalability, and good autonomous navigation effect of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0037] In this embodiment, taking a traffic accident and tracking the vehicle involved in the accident as examples, the present invention is further described in detail.
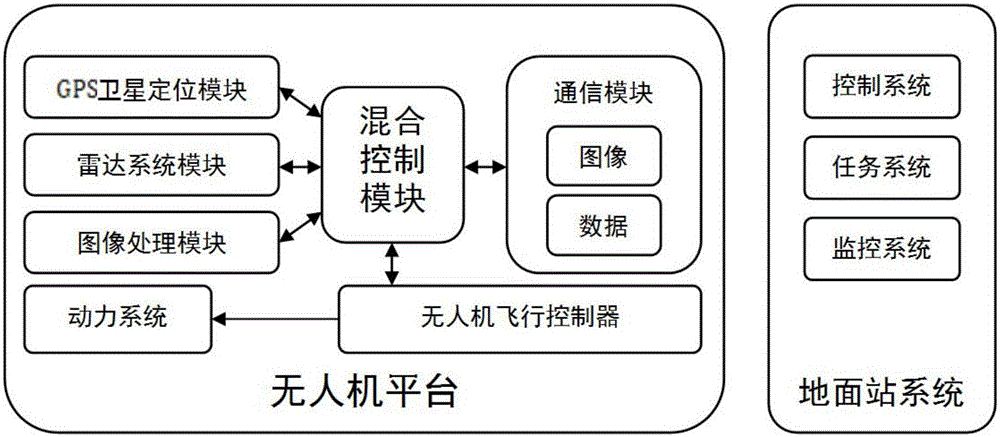
[0038] The present invention is based on image processing and radar UAV autonomous navigation system and method, the system includes traffic UAV control terminal and patrol UAV distributed in the city; traffic patrol UAV hardware includes UAV platform, image processing module, radar system module and hybrid control unit module, the image processing module is divided into high-speed camera Gopro camera, Feiyu MINI gimbal and Android embedded MK802IV image processing unit module; the radar system module is divided into microwave millimeter wave radar module, high-speed FPGA signal The processing module; the hybrid control module includes a high-speed Linux embedded processing unit of the UAV and is connected with the UAV aircraft control unit; the traffic UAV control terminal tracks and locks the UAV in real ti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More