

Wheelchair robot and indoor autonomous navigation method thereof
A technology of robots and wheelchairs, which is applied in the fields of instruments, motor vehicles, and vehicle rescue. It can solve the problems of automatic navigation and manual control of wheelchairs, and achieve the effects of low development costs, real-time performance, and improved work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in combination with specific examples and with reference to the accompanying drawings.
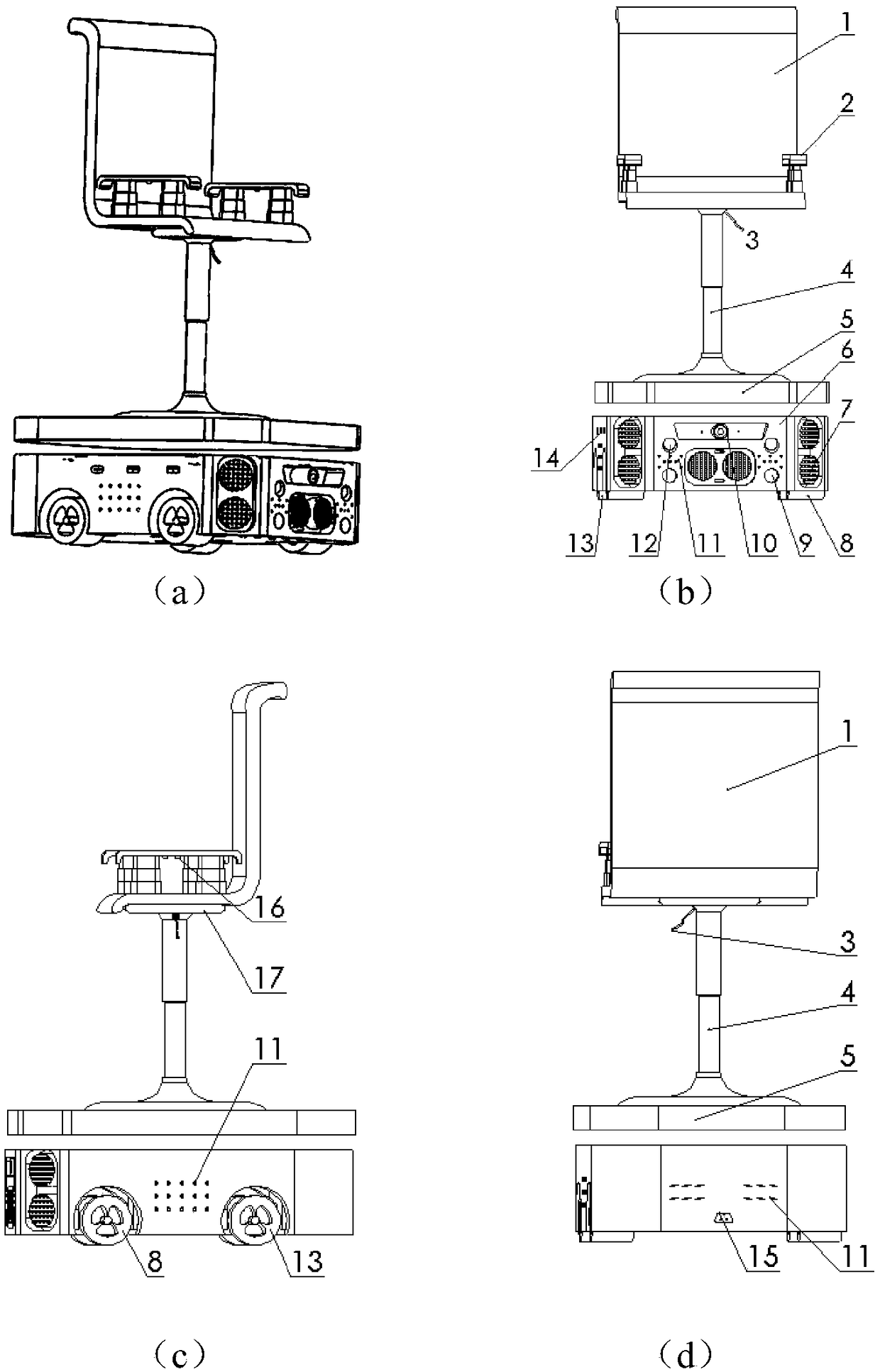
[0051] A wheelchair robot consists of a seat and a mobile platform 6. Wherein the seat is installed on the mobile platform 6, and moves with the mobile platform 6.
[0052] Above-mentioned seat is adjustable lifting seat, and it can adopt common seat in the prior art. In this embodiment, the seat is mainly composed of a chair body 1 , an armrest 2 , an elevating adjustment rod 3 , an elevating and rotating pillar 4 , a chair base 5 , a hand control button 16 and a pillar tray 17 . The chair back of the chair body 1 can be flipped forward and folded by 90°. For example, after the chair base 5 and the mobile platform 6 are separated up and down, the components formed by the former can serve as ordinary seats. If the chair b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More