

Robot navigation method based on machine vision and machine learning
A navigation method and robot technology, applied in the field of robot navigation based on machine vision and machine learning, can solve problems such as no applicable navigation method, complex and changeable environment, and inability to apply mobile robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the objectives, technical solutions and advantages of the present application clearer, the present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments. Obviously, the described embodiments are only a part of the embodiments of the present application, but not all of the embodiments. Based on the embodiments in this application, all other embodiments obtained by those skilled in the art without creative efforts shall fall within the protection scope of this application.
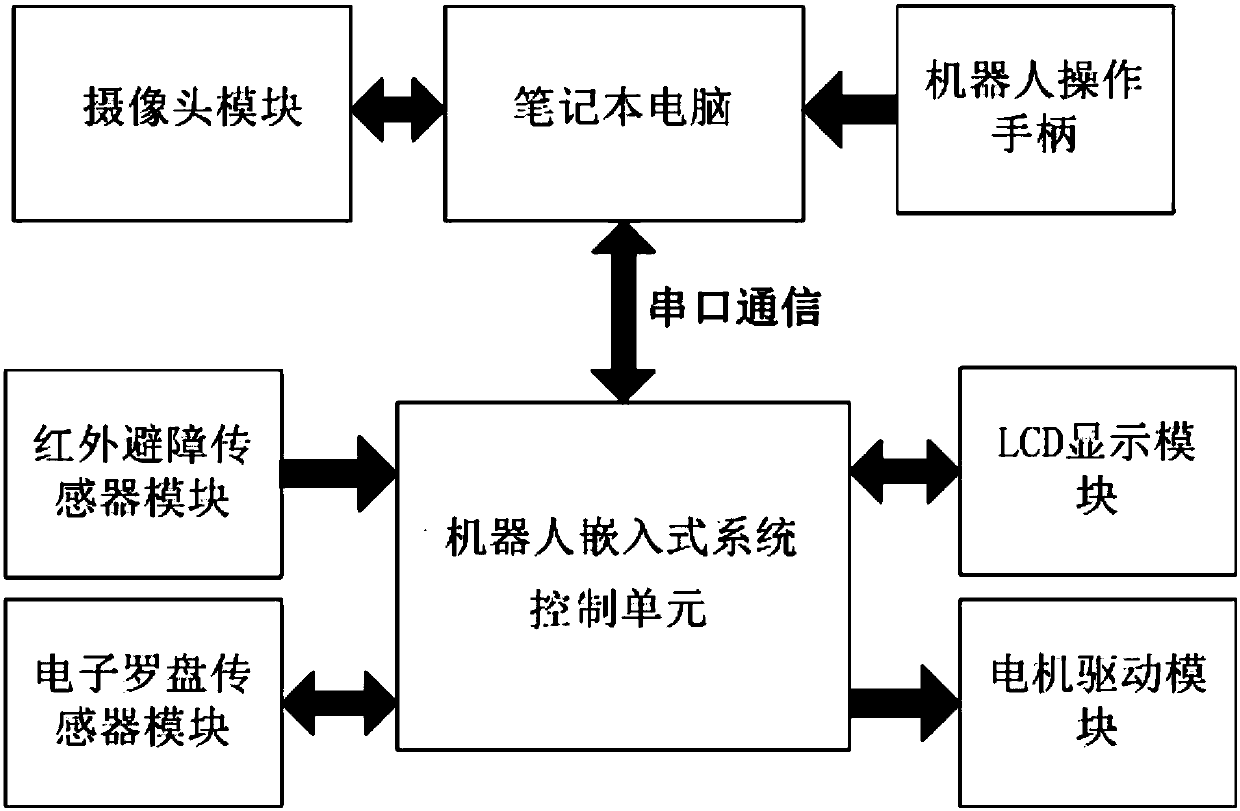
[0023] The robot hardware platform involved in the present invention is such as figure 1 As shown, it mainly includes the following components:
[0024] Host computer: For example, using a laptop, mainly running machine learning algorithms and visual image processing algorithms.
[0025] Robot operating handle: used for expert remote control robot operation.
[0026] Camera module: In the form of each frame image, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More