

Robot navigation method and device based on multi-sensor data fusion
A data fusion and multi-sensor technology, applied in two-dimensional position/channel control, instruments, motor vehicles, etc., can solve problems such as poor navigation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
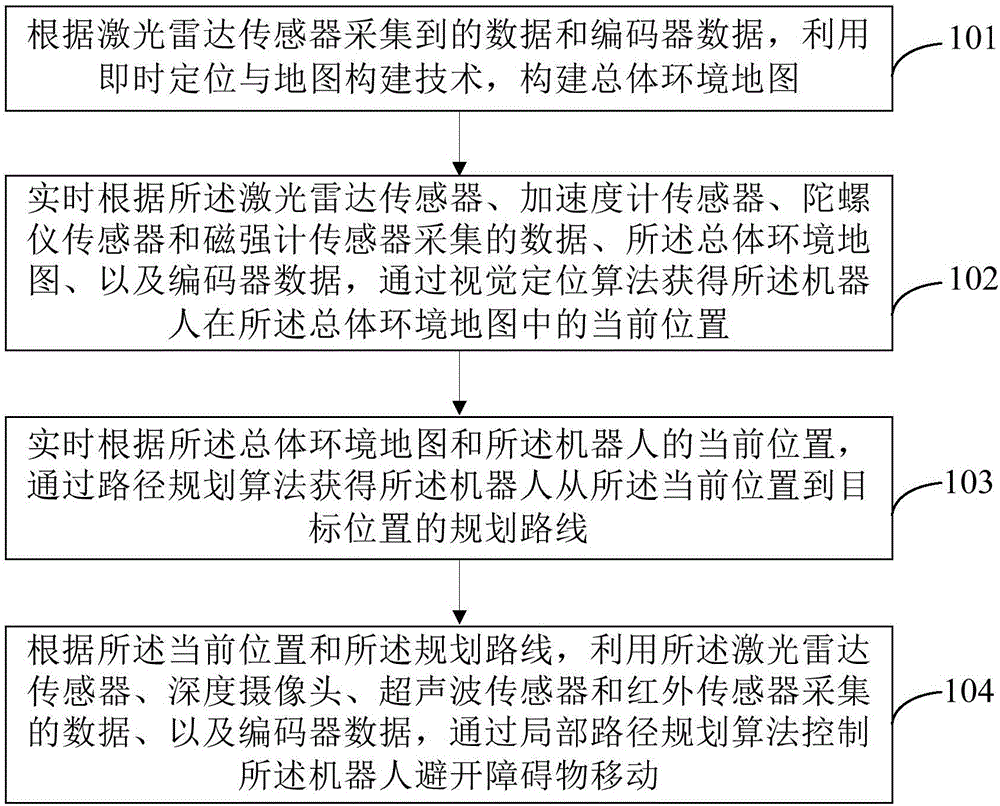
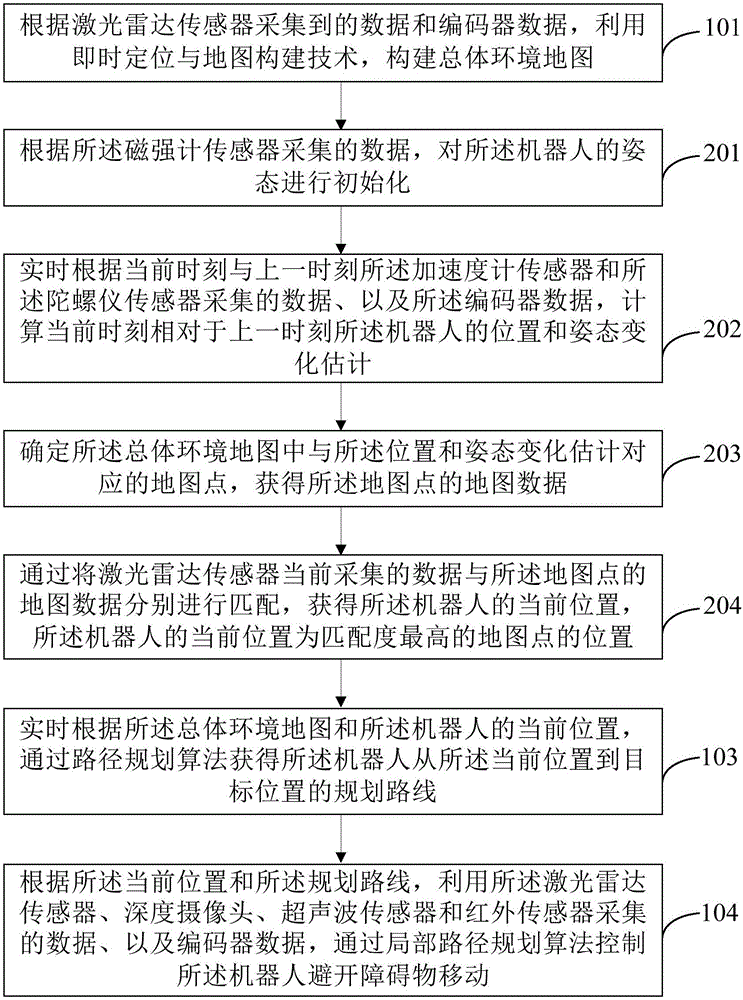
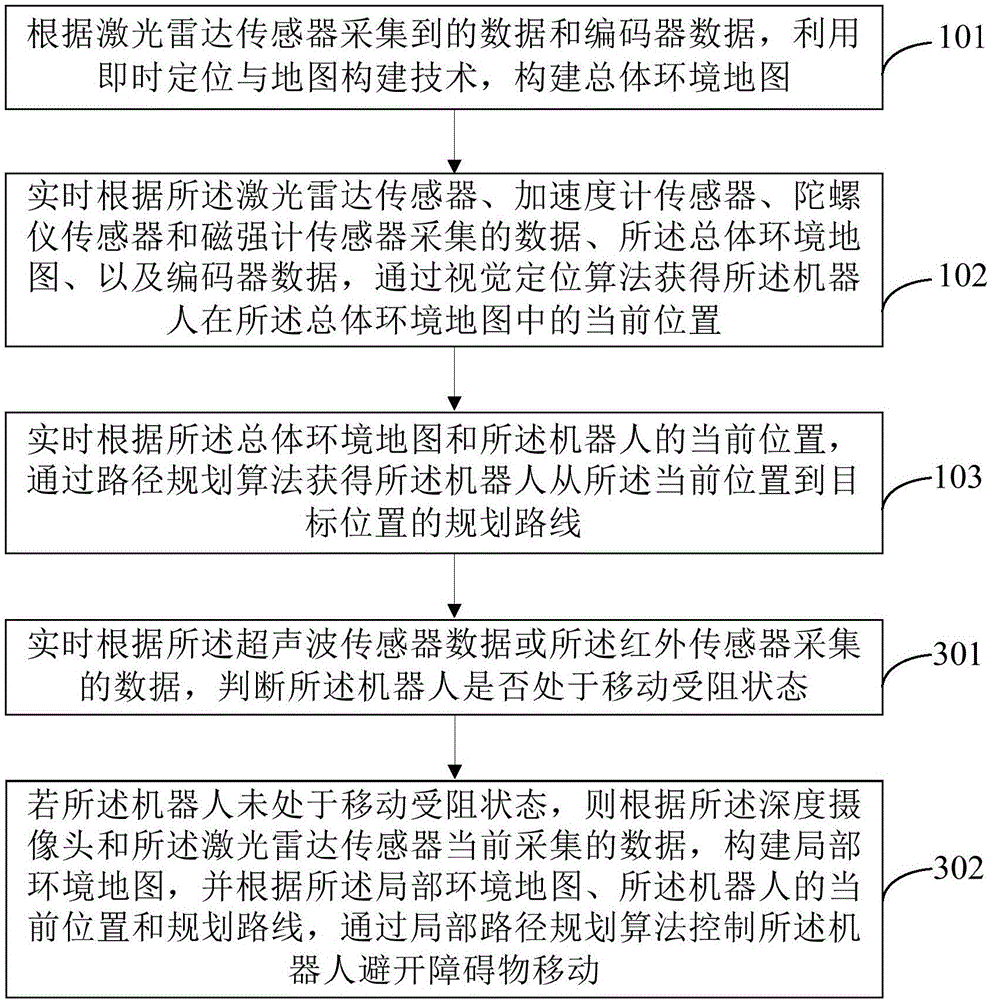
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be described clearly and completely below with reference to the accompanying drawings in the embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
[0021] For the sake of clarity, definitions of certain words or phrases used in the present invention are first set forth.
[0022] Lidar: Provides distance information from the robot to obstacles in the surrounding environment, usually a two-dimensional slice of the surrounding environment. It can be used for map construction, positioning, real-time obstacle avoidance, etc. High precision, high stability, low noise and high cost. The visible d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More