

Unmanned aerial vehicle cluster target defense method based on deep reinforcement learning
A technology of reinforcement learning and unmanned aerial vehicles, applied in neural learning methods, simulators, simulation devices for space navigation conditions, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
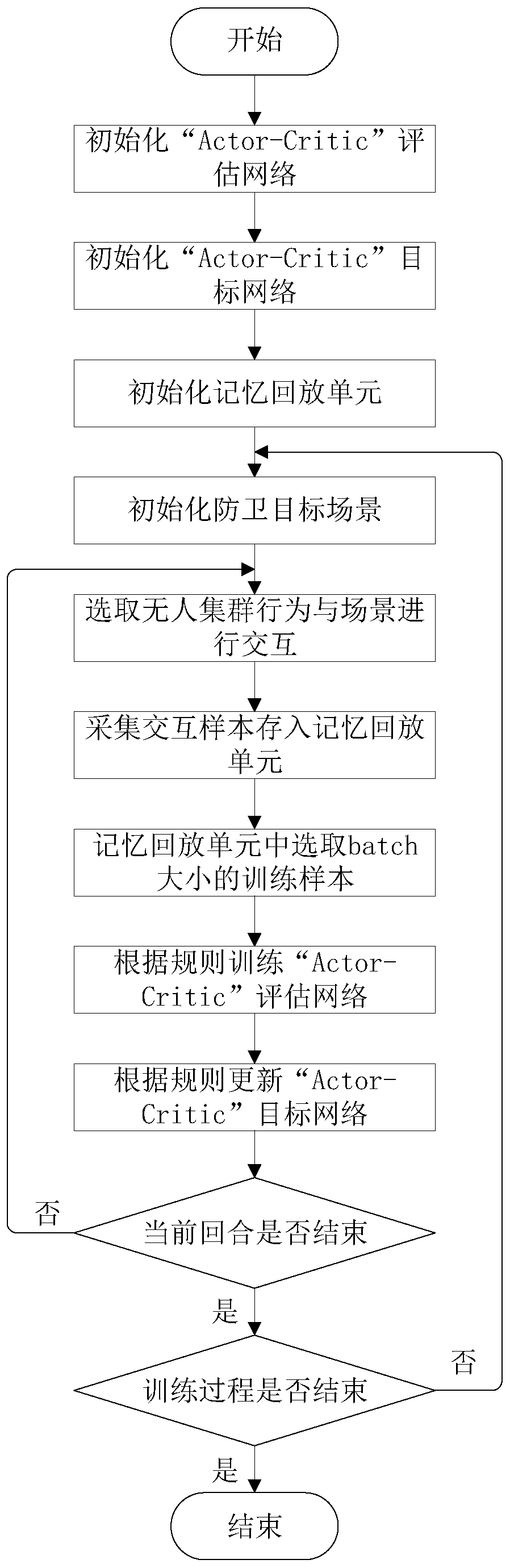
[0053] Such as figure 1 Shown, concrete steps of the present invention are as follows:
[0054] Step 1: The specific steps of the training phase are as follows:
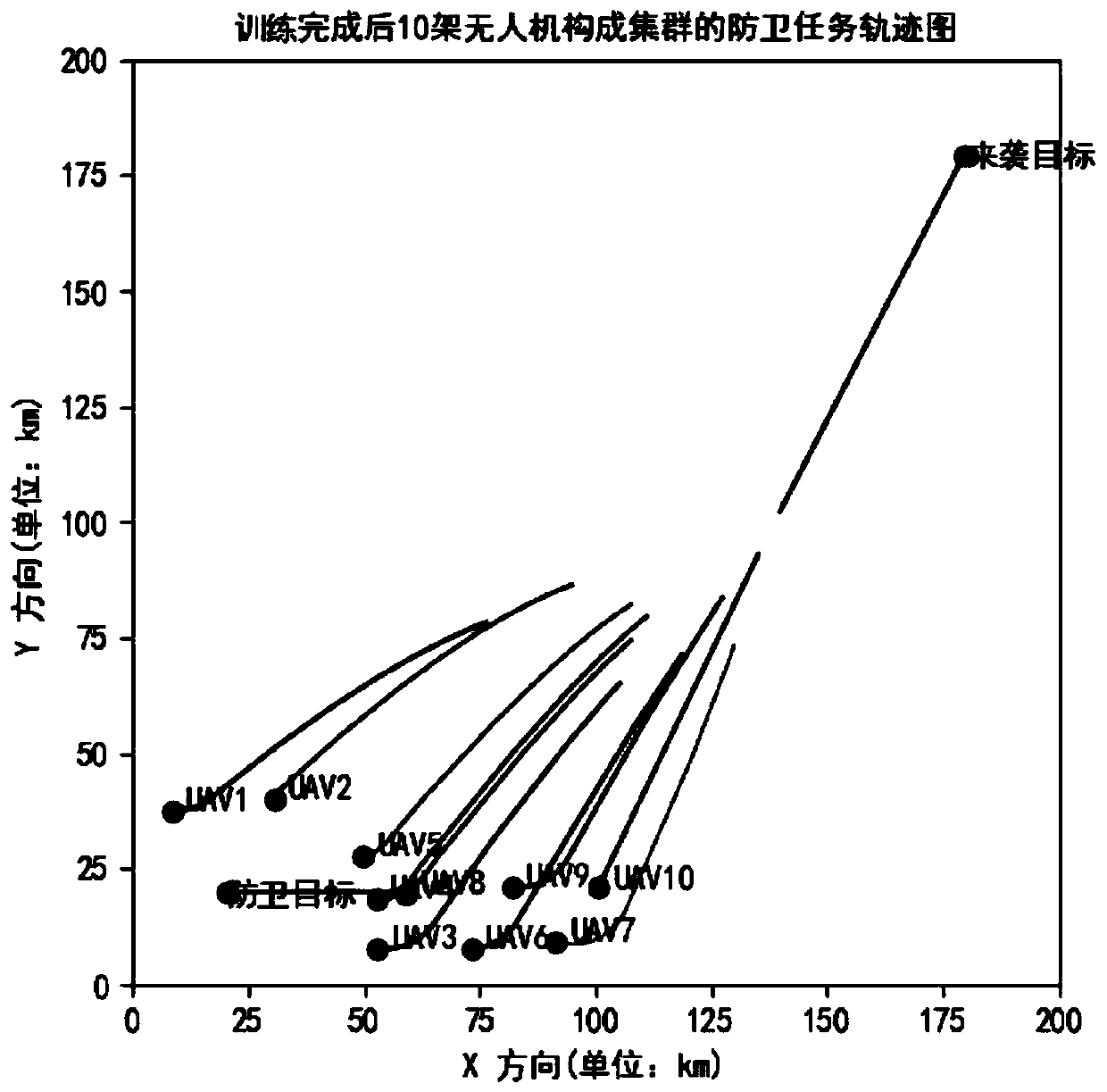
[0055] Step 1-1: Initialize the state of the incoming target in the designated area of the strategic target scene to be defended, and obtain the initial position information and behavior information of the incoming target; the number of initialization is m uav The UAVs clustered around the defense target of one's own side, gaining m uav The status information of the UAV, the status information includes the position (x i ,y i ), i=1...m uav and speed In the present invention, the environment is a continuous environment data unit of 200*200, the defended target of one's own side moves horizontally to the right at a speed of v=3, 10 unmanned aerial vehicles are initialized in the surroun...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More