

A tracking control method and system for fixed-time trajectory tracking of manipulator input saturation
A fixed time, trajectory tracking technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inaccuracy and speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0101] First of all, it needs to be explained that the artificial neural network has the ability to map the input-output relationship only by using the prior input-output information. Because the neural network has good function approximation ability, it is widely used in the control of uncertain nonlinear systems. design.
[0102] The method based on Radial Basis Function Neural Network (RBFNN) is feasible to approximate nonlinear functions with arbitrary precision under certain conditions. With no or relatively limited knowledge of system dynamics, it is possible to efficiently construct a controller to achieve mission control. There are a large number of examples of intelligent control methods such as sliding mode control, dynamic surface control, impedance control, and fuzzy logic control in engineering.
[0103] Reinforcement learning is different from supervised learning in that it is a learning method that obtains training information from the environment and is an eva...
no. 2 example
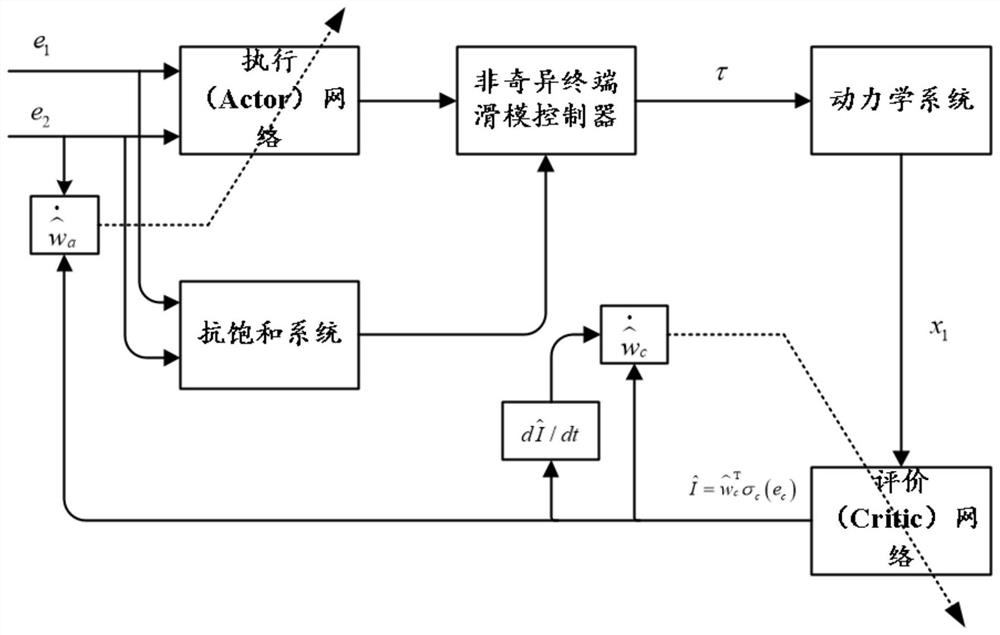
[0251] This embodiment provides a trajectory tracking control system for fixed time input saturation of a manipulator, which includes:
[0252] The expected trajectory and state data acquisition module of the mechanical arm is used to obtain the expected trajectory of the mechanical arm, and obtain the state data of the mechanical arm through the sensor of the mechanical arm;
[0253] The reinforcement learning control module is used to suppress the model uncertainty of the mechanical arm by using the reinforcement learning control algorithm according to the acquired state data;
[0254] The nonlinear anti-saturation compensator design module is used to design the nonlinear anti-saturation compensator to compensate the saturation overflow effect of the joint torque actuator in real time;
[0255] Non-singular fast terminal sliding mode controller is used to design non-singular fast terminal sliding mode controller, so that the trajectory tracking error of the manipulator joint...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More