

Parallel ankle rehabilitation robot
A rehabilitation robot and parallel technology, applied in the field of rehabilitation robots, can solve the problems such as the inability to realize the coincidence of the rotation center of the mechanism and the ankle joint motion center, the inability to record the patient's training and rehabilitation parameters in real time, and the training mode not meeting the needs of the human body structure. Reduce the complexity of control, good rehabilitation effect, and the effect of less number of motor pairs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
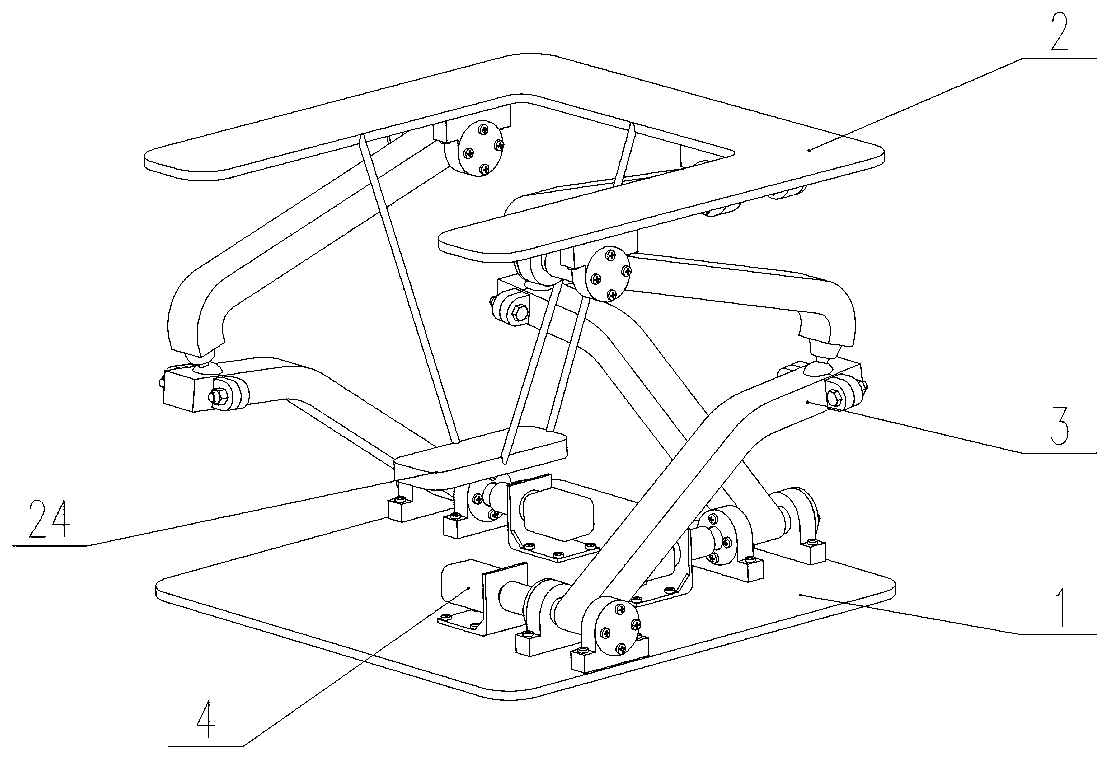
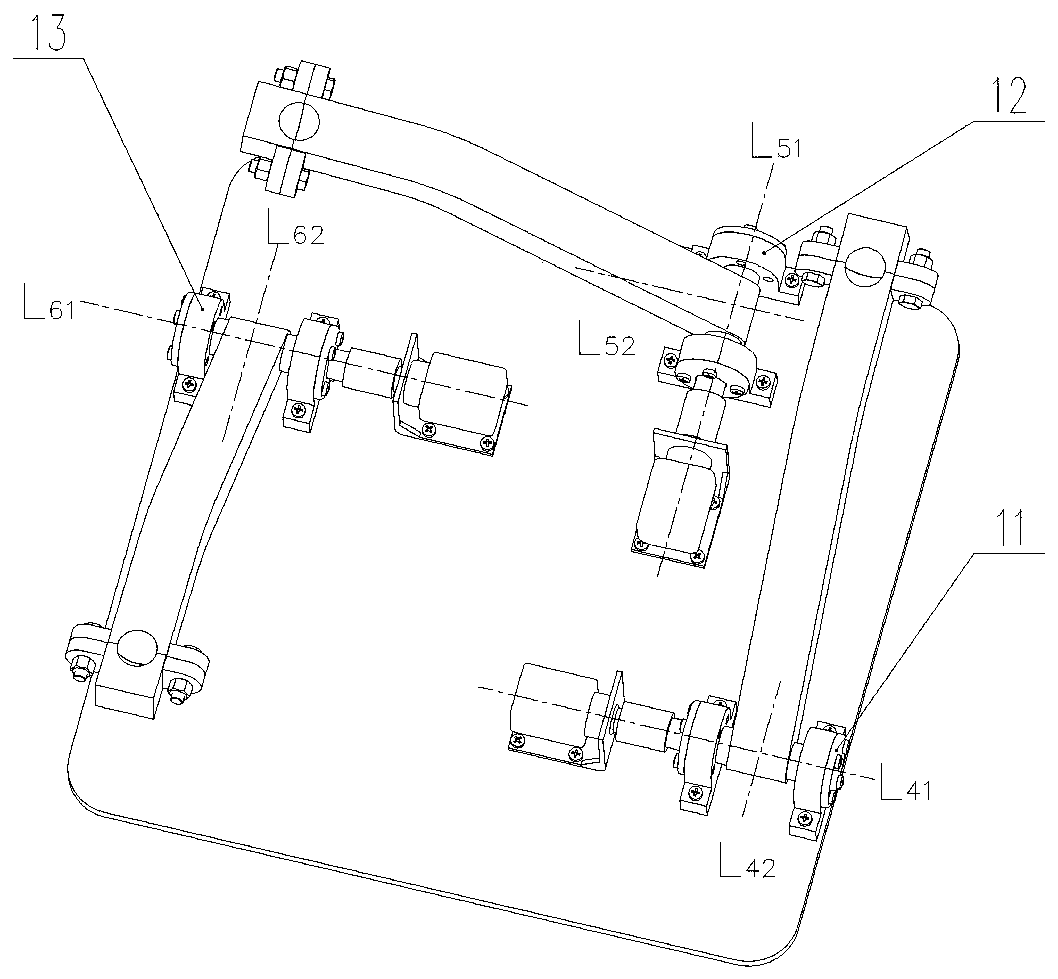
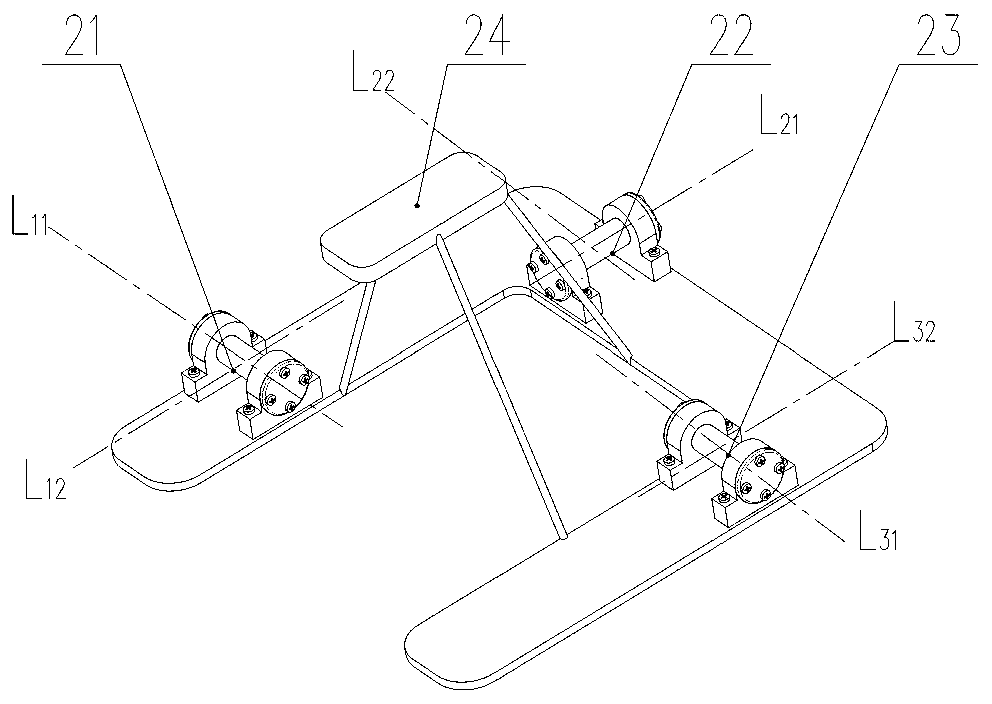
[0041] Specifically, the parallel ankle rehabilitation robot provided in this embodiment includes three parallel motion branches, which are respectively the first motion branch, the second motion branch and the third motion branch. The structural components of the three motion branches are the same, and are Rotating pair-spherical joint-rotating pair RSR structure, the two ends of the three motion branches are respectively connected to the fixed platform 1 and the moving platform 2, driven by the corresponding driving device 4, and then realize the lifting, rolling and pitching of the moving platform 2 Motion with three degrees of freedom. The device of the present invention has three degrees of freedom, which can not only better realize the pronation / supination, varus / valgus movement of the human ankle joint, but also realize the adjustment of the height direction of the rotation axis, so that the movement of the device is more in line with the human ankle joint. The movement...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More