

Multi-UAV path planning method based on edge computing dynamic task arrival
A dynamic task, multi-UAV technology, applied in combustion engines, internal combustion piston engines, mechanical equipment, etc., can solve the problems of not considering the energy consumption of UAVs, ignoring the waiting delay of base station servers, and low communication efficiency, achieving increased The effect of scheduling constraints, reducing complexity, and improving system energy efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0130] In order to make the purpose, technical solutions and advantages of the present application more clearly understood, the present application will be described in further detail below with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present application, but not to limit the present application.
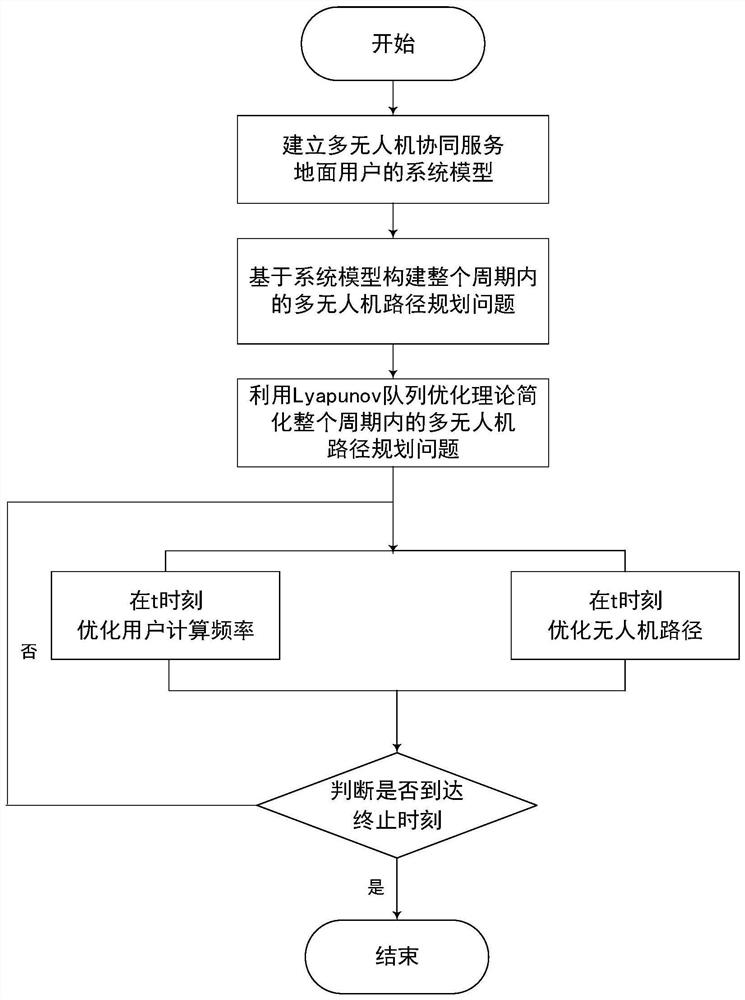
[0131] In one embodiment, combining figure 1 , providing a multi-UAV path planning method based on edge computing dynamic task arrival, the method comprising:
[0132] Step 1, establish a system model of multi-UAV cooperative service for ground users;
[0133] Step 2, based on the system model, construct the multi-UAV path planning problem in the whole cycle;
[0134] Step 3, using the Lyapunov queue optimization theory to simplify the multi-UAV path planning problem in the entire cycle to obtain the optimization problem in a single time slot;
[0135] Step 4, accordi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More