

Motor Control Method
A technology of motor control and virtual spindle, applied in the direction of speed adjustment of multiple motors, which can solve the problems of large disturbance influence and unstable control process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
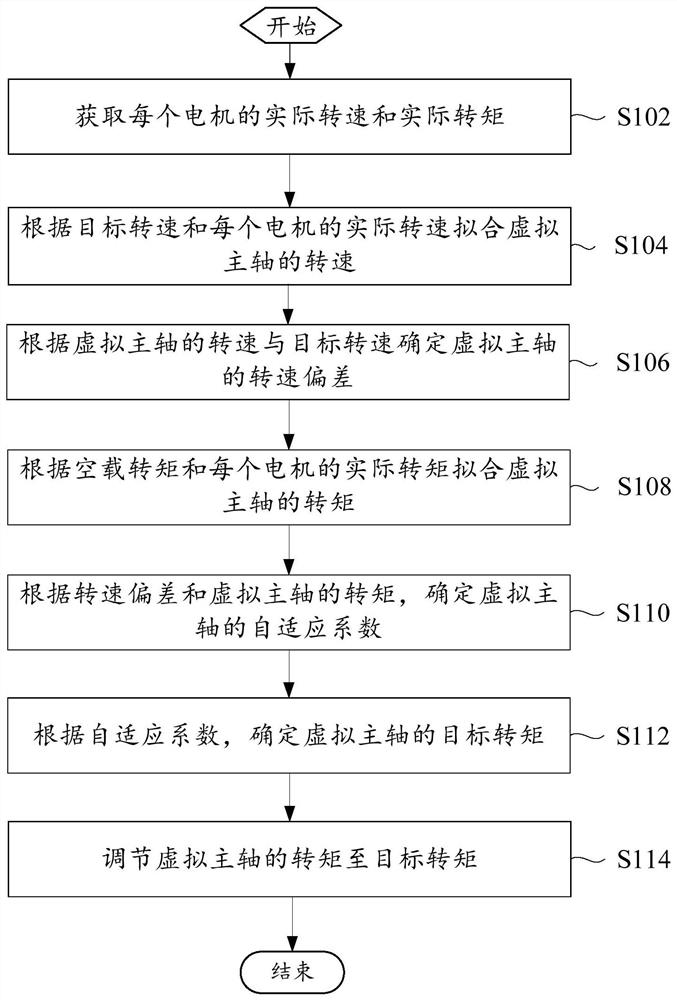
[0045] Such as figure 1 As shown, the present invention provides a motor control method. There are multiple motors, and the multiple motors have the same target speed and no-load torque. The motor control method includes:
[0046] S102: Obtain the actual speed and actual torque of each motor;
[0047] S104: Fitting the speed of the virtual main shaft according to the target speed and the actual speed of each motor;
[0048] S106: Determine the rotational speed deviation of the virtual main shaft according to the rotational speed of the virtual main shaft and the target rotational speed;
[0049] S108: fitting the torque of the virtual main shaft according to the no-load torque and the actual torque of each motor;
[0050] S110: Determine the adaptive coefficient of the virtual main shaft according to the rotational speed deviation and the torque of the virtual main shaft;
[0051] S112: Determine the target torque of the virtual main shaft according to the adaptive coeffici...
Embodiment 2
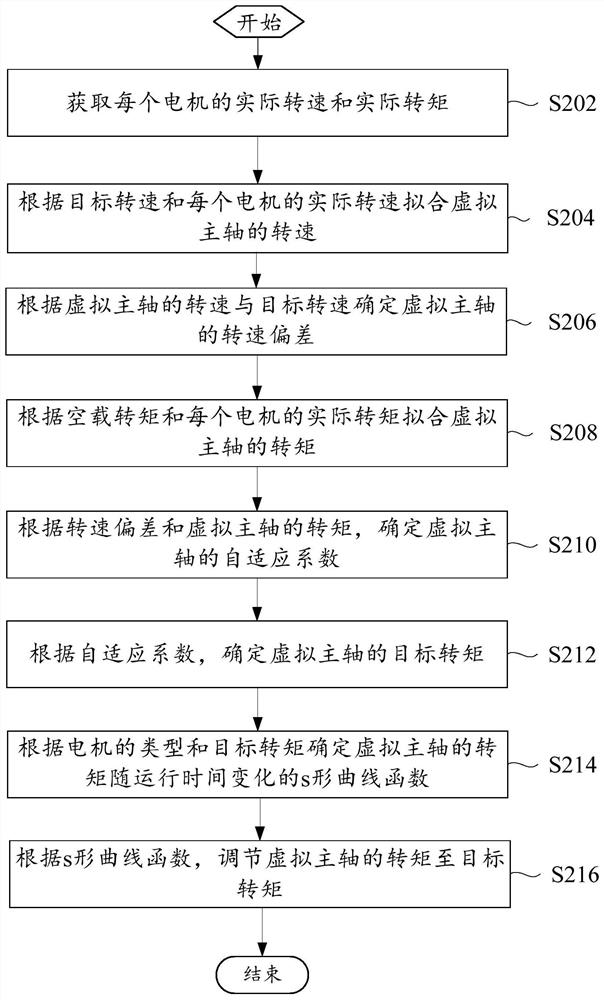
[0055] Such as figure 2 As shown, on the basis of the first embodiment above, the motor control method includes:
[0056] S202: Obtain the actual speed and actual torque of each motor;
[0057] S204: Fitting the speed of the virtual main shaft according to the target speed and the actual speed of each motor;
[0058] S206: Determine the rotational speed deviation of the virtual main shaft according to the rotational speed of the virtual main shaft and the target rotational speed;
[0059] S208: Fitting the torque of the virtual main shaft according to the no-load torque and the actual torque of each motor;
[0060] S210: Determine the adaptive coefficient of the virtual main shaft according to the rotational speed deviation and the torque of the virtual main shaft;
[0061] S212: Determine the target torque of the virtual main shaft according to the adaptive coefficient;
[0062] S214: Determine the s-shaped curve function of the torque of the virtual main shaft changing ...
Embodiment 3
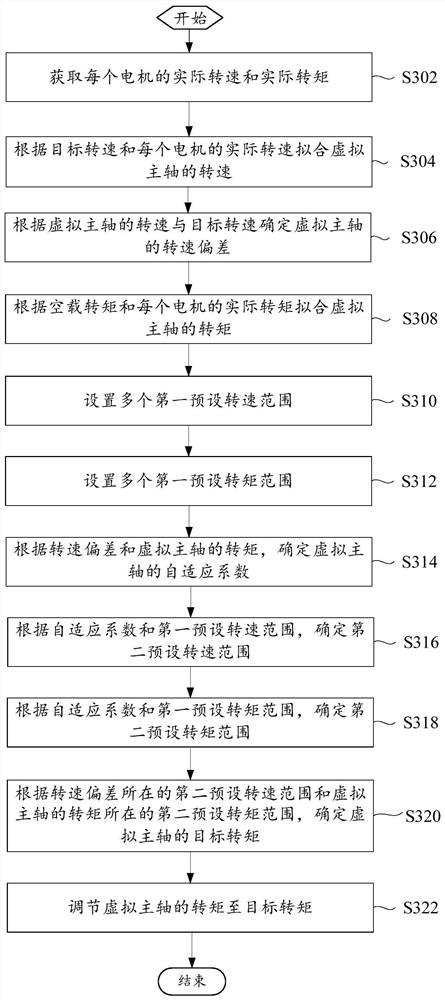
[0074] Such as image 3 As shown, on the basis of the foregoing embodiments, the motor control method includes:
[0075] S302: Obtain the actual speed and actual torque of each motor;
[0076] S304: Fitting the speed of the virtual main shaft according to the target speed and the actual speed of each motor;
[0077] S306: Determine the rotational speed deviation of the virtual main shaft according to the rotational speed of the virtual main shaft and the target rotational speed;
[0078] S308: Fitting the torque of the virtual main shaft according to the no-load torque and the actual torque of each motor;
[0079] S310: Setting a plurality of first preset speed ranges;
[0080] S312: Setting a plurality of first preset torque ranges;
[0081] S314: Determine the adaptive coefficient of the virtual main shaft according to the rotational speed deviation and the torque of the virtual main shaft;
[0082] S316: Determine a second preset speed range according to the adaptive c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More