

A layered obstacle avoidance method for unmanned boats based on improved fruit fly optimization and dynamic window method
A fruit fly optimization algorithm and dynamic window technology, applied in non-electric variable control, two-dimensional position/channel control, instruments, etc., can solve problems such as collision accidents and safety threats, and achieve the effect of improving accuracy and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
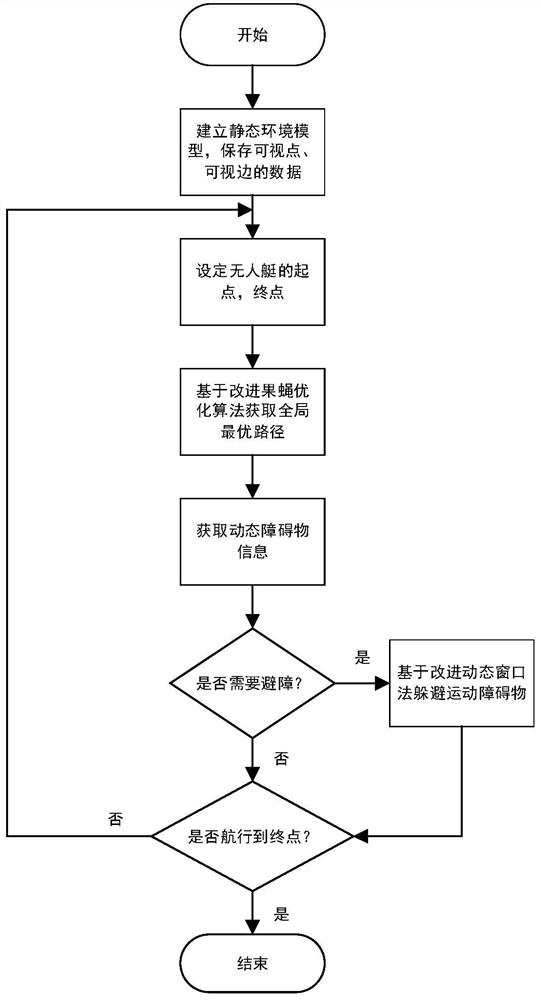
[0032] In order to illustrate the technical solutions of the present invention more clearly, the present invention will be briefly introduced below with reference to an example of implementation. combine now figure 1 , to describe the specific steps of implementation.
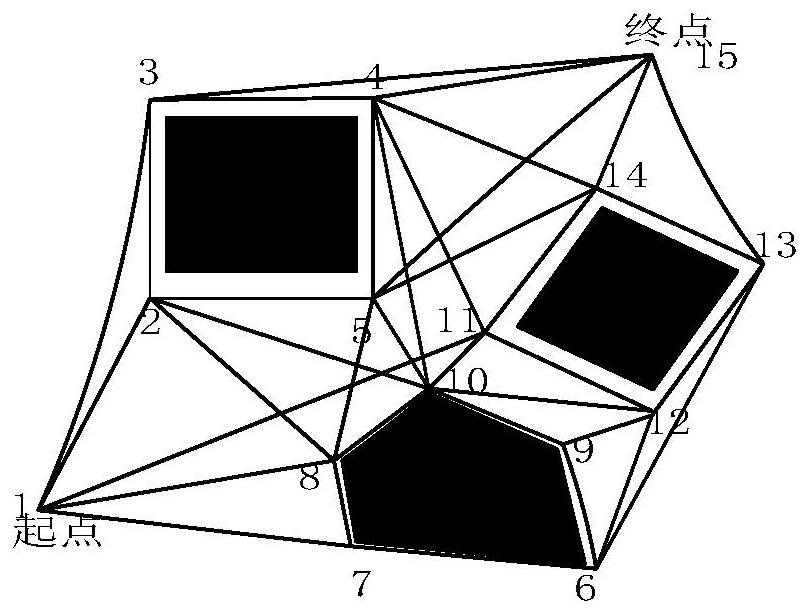
[0033] Step S1: establish a geographical environment model for unmanned boat navigation at sea based on electronic charts;
[0034] Obtain the geographic environment information of the unmanned boat navigation sea area from the electronic chart, regard the island as a static obstacle, and "expand" the obstacle through the visual method to obtain map information, such as figure 2 , which saves the coordinates of the visible points and the data of the visible edges. Use inertial sensors such as marine accelerometers, gyroscopes, and magnetic compass to obtain the position information of the unmanned boat through dead reckoning, and specify the starting point and destination of the sailing.
[0035] Step S2: u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More