Multi-robot communication method and device based on ROS system
A multi-robot and communication method technology, applied in the field of robot communication, can solve problems such as huge amount of information, unknown errors, and complexity, and achieve the effect of reducing information transmission errors and avoiding accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
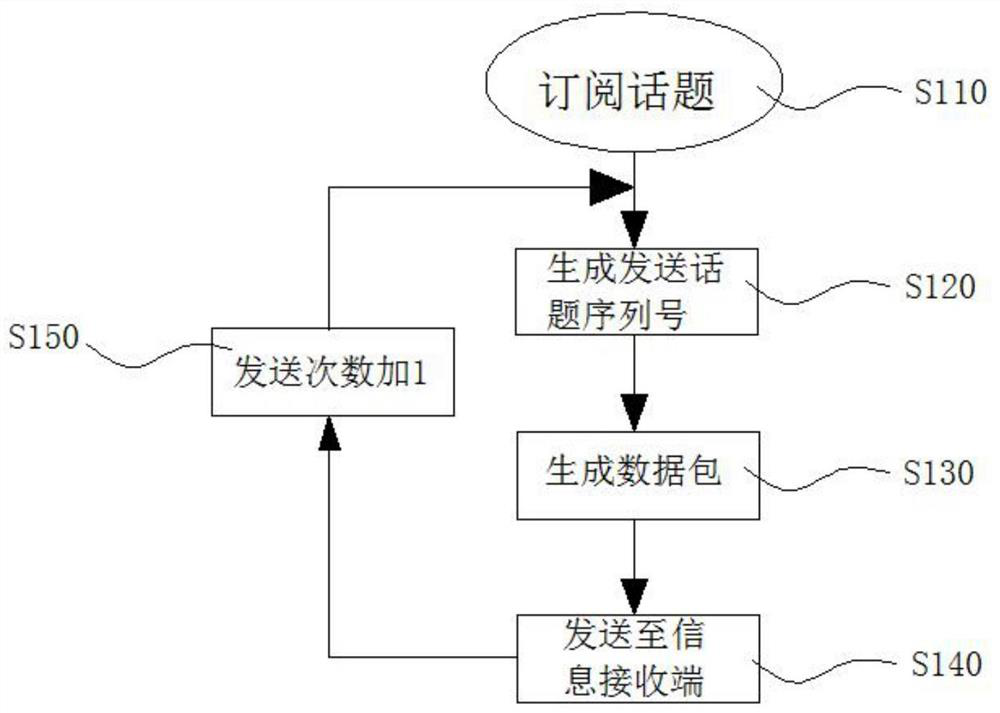
[0058] The embodiment of the present invention discloses a multi-robot communication method based on the ROS system, which is applied to the information sending end in the multi-robot system, such as figure 1 As shown, it specifically includes the following steps:
[0059] Step S110, subscribe to the topic to be sent in the current ROS system; Step S120, call the callback function of the topic to generate the serial number of the topic to be sent; wherein, the serial number of the topic to be sent is composed of the number of the information sending end, the number of the information receiving end, the number of the topic and the number of times of sending Number composition; step S130, generate a data packet according to the serial number of the topic to be sent; wherein, the data packet includes the current ROS system time, the serial numbe...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap