

Path tracking control method of transfer robot based on neural network
A handling robot, path tracking technology, applied in neural learning methods, biological neural network models, two-dimensional position/channel control, etc., can solve problems such as poor real-time performance of nonlinear model predictive control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
[0070] Aiming at the problem of poor real-time performance of existing nonlinear model predictive control, the present invention provides a path tracking control method for a handling robot based on a neural network.
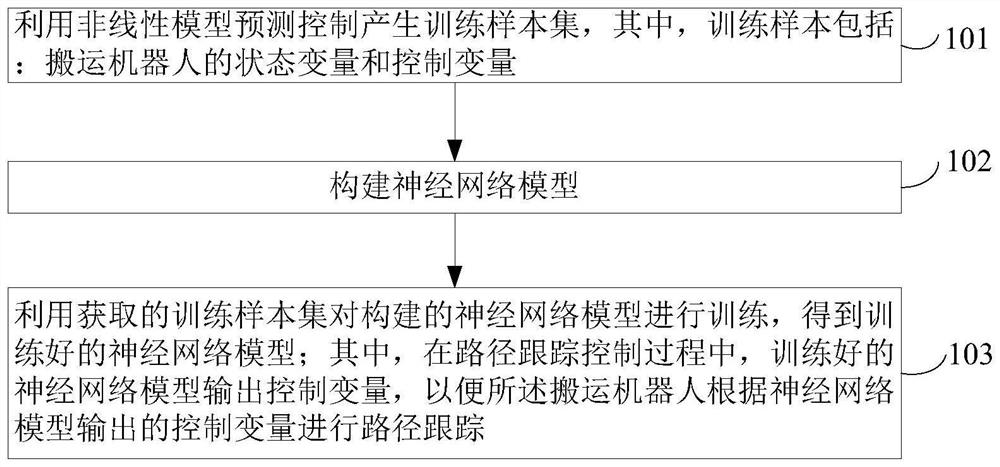
[0071] Such as figure 1 As shown, the path tracking control method of the neural network-based handling robot provided by the embodiment of the present invention includes:
[0072] S101, using nonlinear model predictive control to generate a training sample set, wherein the training samples include: state variables and control variables of the handling robot;
[0073] S102, constructing a neural network model;
[0074] S103, using the obtained training sample set to train the constructed neural network model to obtain a trained neural ne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More