

Mobile robot NMPC method based on fixed time stability theory
A mobile robot and fixed time technology, applied in the field of mobile robots, can solve problems such as poor real-time performance, achieve good closed-loop performance, good interference suppression performance, and improve real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
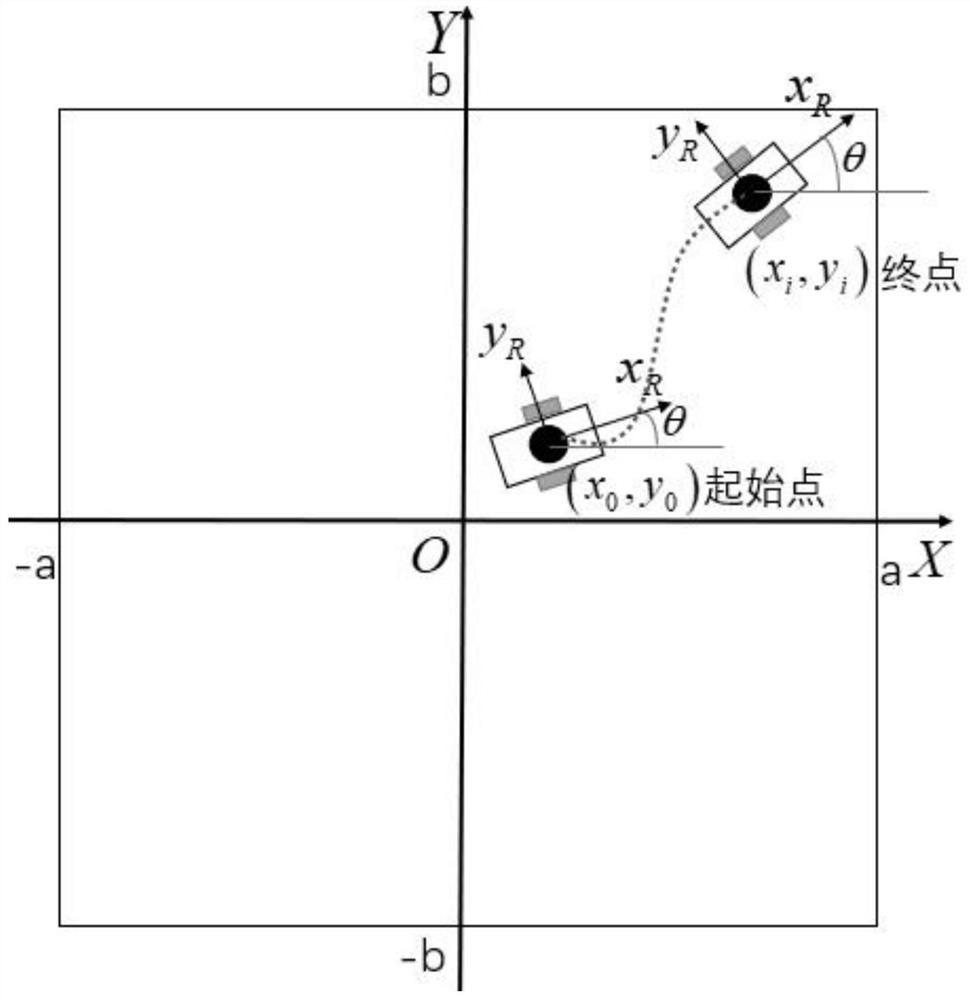
[0051] Example: as figure 1 As shown, a mobile robot NMPC (Nonlinear Model Predictive Control) method based on the fixed-time stability theory includes the following steps:
[0052] S1. Establish a kinematic model of a two-wheel differentially driven mobile robot;
[0053] The kinematic model is: Among them, x∈R and y∈R are the position of the mobile robot, θ is the angle between the moving direction of the robot and the positive direction of X, v and ω are the linear and angular velocities of the mobile robot, and the matrix form of the state quantity is [x y θ] T , the matrix form of the control quantity is [v ω] T .
[0054] Discretize the kinematic model of a wheeled mobile robot:
[0055]
[0056] where ΔT is the sampling time.
[0057] The kinematic model of the mobile robot sets the constraint information:
[0058] S2. Introduce the Hamiltonian and discretize the continuous system to obtain the necessary discrete condition F(U,x,t) for optimality;
[0059] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More