

Collaborative robot constant-force massage method based on PID algorithm
A technology for robots and robot bodies, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as high noise, poor versatility, and complicated operations, and achieve improved intelligence, manpower saving, and optimization of control accuracy and real-time performance. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0023] The method of the invention achieves massaging the human body with a constant force by programming the collaborative robot.
[0024] A kind of collaborative robot constant force massage method based on PID algorithm of the present invention as shown in the accompanying drawing, comprises the following steps:
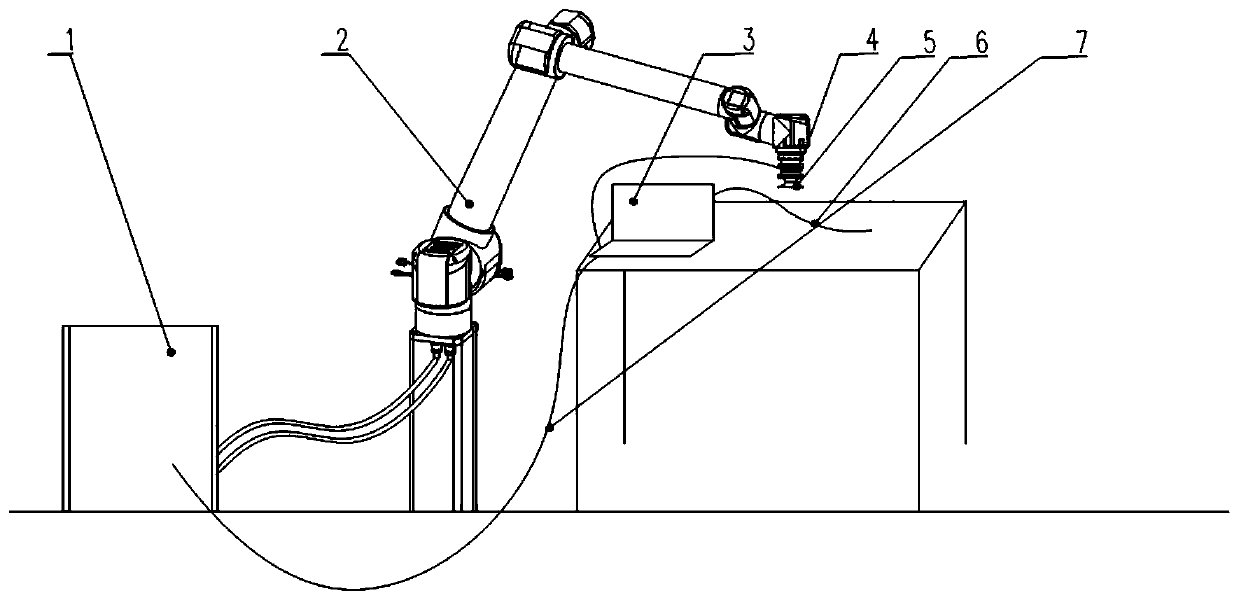
[0025] Step 1. Install the device:
[0026] The upper computer 3 is connected to the robot controller in the robot control system 1 through the TCP network cable 7, the robot controller is connected to the servo driver, the servo driver is connected to the joint motor of the robot body 2, and the robot teaching device matched with the robot controller is connected to the The robot controller is connected, and the connection communication between the upper computer 3 interface and the robot controller is realized through the TCP ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More