Robot walking path planning method based on genetic algorithm and artificial potential field method
A technology of artificial potential field method and genetic algorithm, which is applied in the field of robot walking path planning, can solve the limitations of artificial potential field method and other problems, and achieve the effect of avoiding falling into extreme points, eliminating oscillation points, and high safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The technical solution of the present invention will be described in detail below in conjunction with the drawings.
[0051] The present invention provides a robot walking path planning method based on genetic algorithm and artificial potential field method, including the following steps:
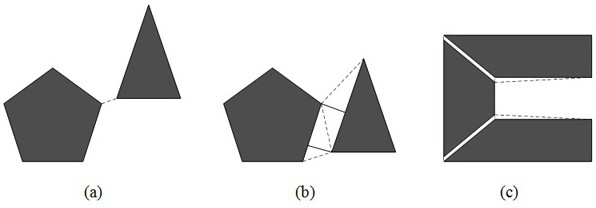
[0052] Step S1: Perform environmental modeling on the working area of the substation through the improved Maklink method and genetically code the path nodes;
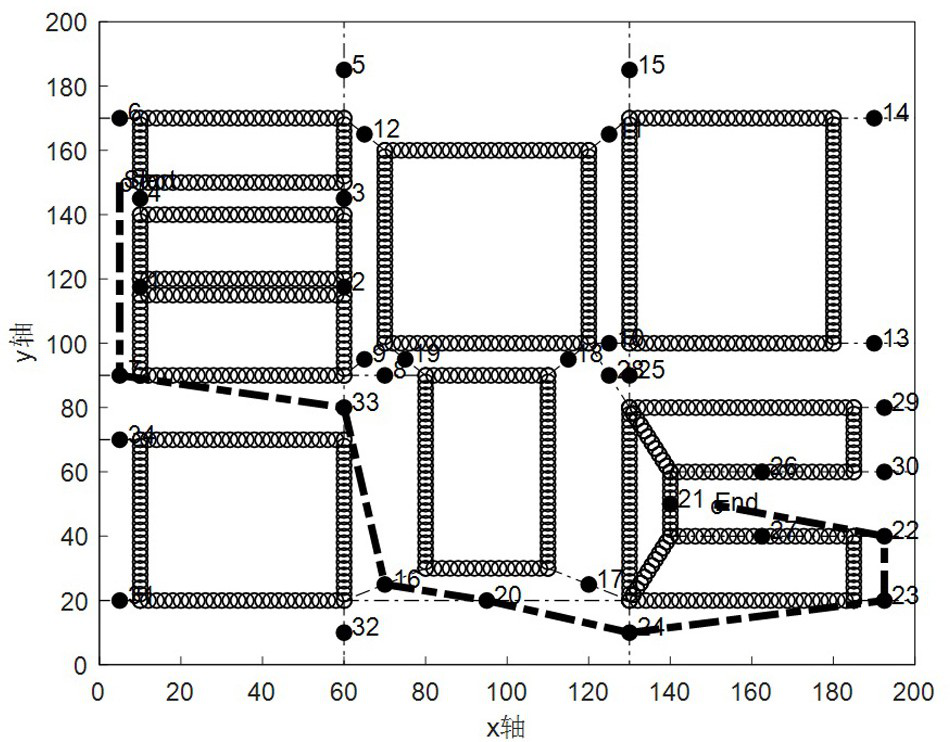
[0053] Step S2: Use the Dijkstra algorithm to obtain the passed path nodes and construct an artificial potential field environment model, and then optimize the path through the improved artificial potential field method to obtain a smooth passable path;
[0054] Step S3: Iteratively optimize the path by using the genetic algorithm, and finally obtain a smooth and safe shortest path in the working area of the substation containing concave polygons.
[0055] The following is the specific implementation process of the present invention...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com