

A high-energy-efficiency and lightweight leg-foot structure layout and design method for a biped robot
A technology of biped robot and structural layout, applied in the field of robotics, to achieve the effects of reducing moment of inertia, improving walking energy efficiency, and improving battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with drawings and embodiments.
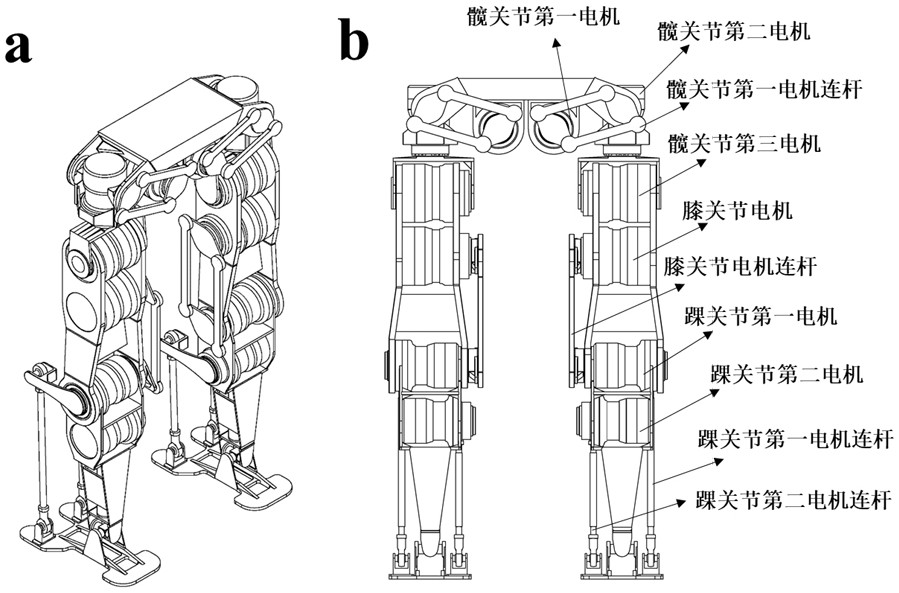
[0031] Such as figure 1 As shown, a biped robot of the present invention has a high-energy-efficiency lightweight leg-foot structure, including a first hip joint motor, a hip joint first motor connecting rod, a hip joint second motor, a hip joint third motor, a knee joint motor, and a knee joint motor. A joint motor link, an ankle first motor, an ankle second motor, an ankle first motor link, and an ankle second motor link. Among them, the first motor of the ankle joint, the second motor of the ankle joint, the motor of the knee joint and the first motor of the hip joint are all driven by connecting rods. The rotation shaft of the second motor of the joint, the rotation shaft of the motor of the knee joint is connected to the rotation shaft of the first motor of the ankle joint through the connecting rod of the motor of the knee joint; the rotation shaft of the first m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More