

Three-degree-of-freedom pneumatic flexible driver with variable rigidity and preparation method thereof
A flexible drive and drive technology, which is applied in the direction of manufacturing tools, program-controlled manipulators, and modification with liquid cooling, can solve the problems of poor load-carrying capacity of the drive and low response rate of stiffness adjustment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
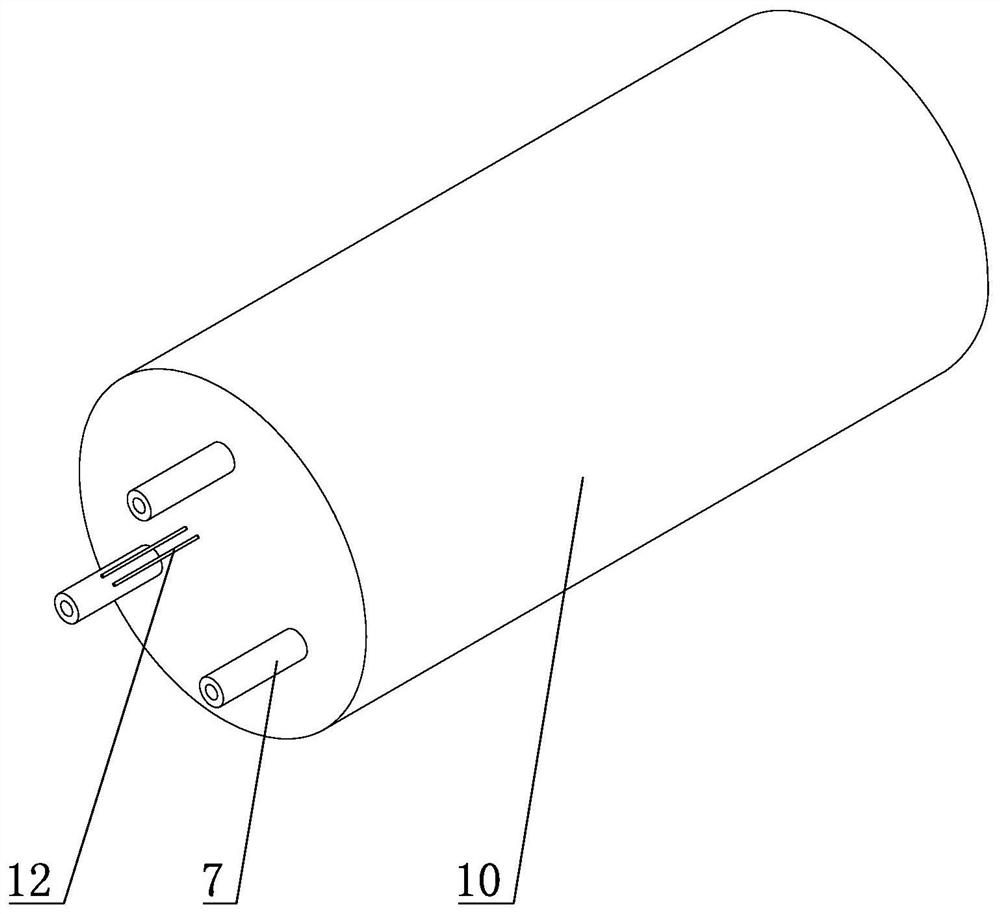
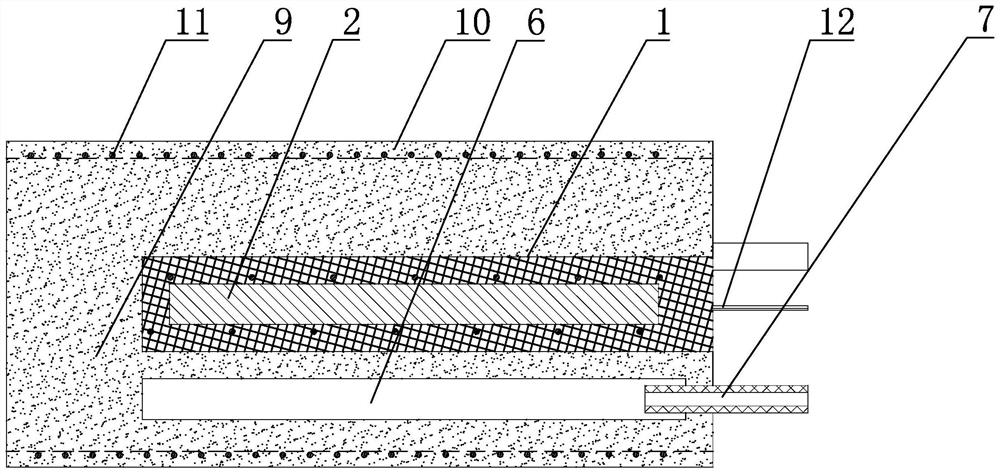
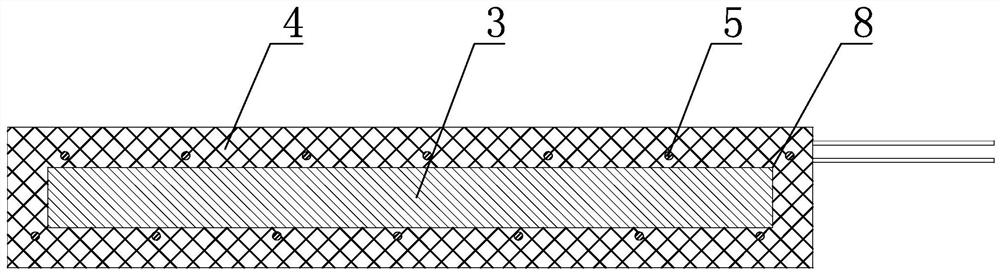
[0033] Such as Figure 1 to Figure 3 As shown, a variable stiffness three-degree-of-freedom pneumatic flexible driver includes a driver body. One end of the driver body is provided with a mounting groove 1 arranged along its length direction, and a variable stiffness module 2 is embedded in the mounting groove. The variable stiffness module includes The liquid metal 3, the protective shell 4 and the heating element 5, the liquid metal is packaged inside the protective shell, several air cavities 6 are opened inside the driver body, the air cavities are arranged along the length direction of the driver body, and the gas pipe 7 inserted on the driver body One end of the air pipe communicates with the air cavity, and the other end of the air pipe extends to the outside of the driver body; the axis of the installation groove is arranged obliquely to the axis of the driver body, and the center of the opening end of the installation groove is on the axis of the driver body. The inst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More