

A method of distance map reconstruction and skip path planning based on anti-collision radius
A path planning and map reconstruction technology, applied in navigation computing tools and other directions, can solve problems such as robustness and real-time performance that cannot meet requirements, redundant detection, and small proportion of obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
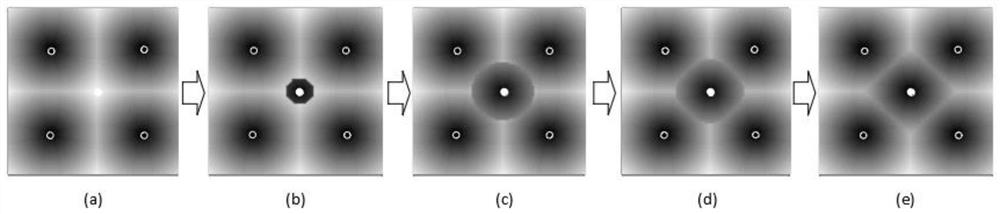
[0049] Figure 6 to Figure 10 A specific embodiment of a distance map reconstruction and jump path planning method based on the collision avoidance radius is shown, including
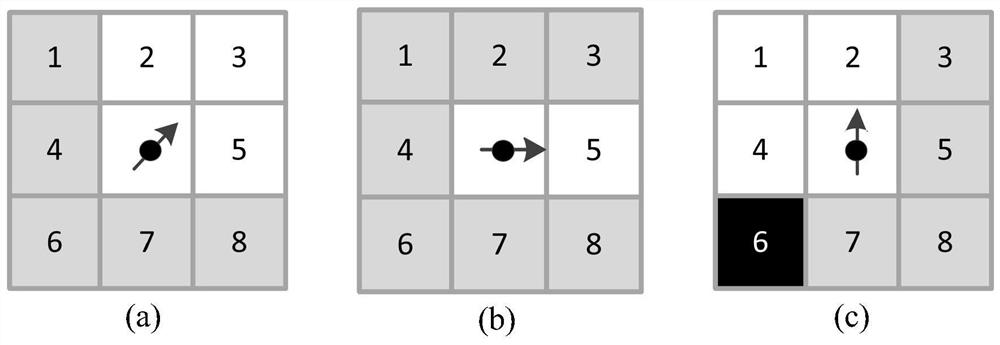
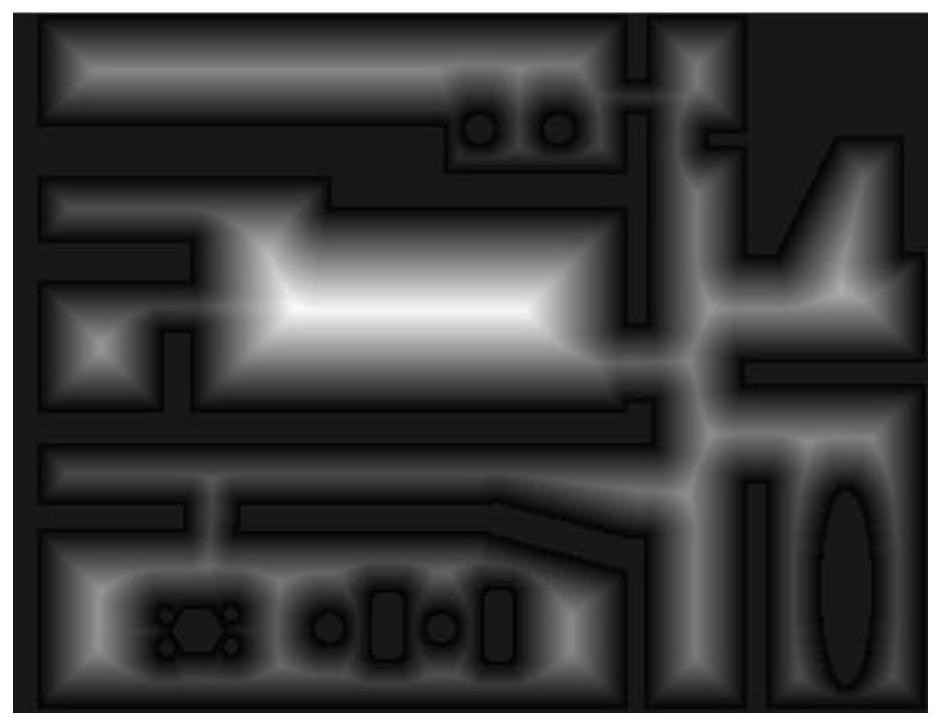
[0050]Step 1: On the two-dimensional plane eight-connected grid path planning map where the planning subject is located, construct a distance map DM based on the anti-collision radius and initialize it. The data structure of the distance map DM includes the eight-connected The obstacle position matrix obst and the distance matrix dist of the same dimension as the grid path planning map, the element obst in the obstacle position matrix obst s What is stored is the coordinate of the grid n where the obstacle closest to the grid s is located, and the element dist in the distance matrix dist s Stored is the Euclidean distance between the grid s and the grid n where the nearest obstacle is located;
[0051] In this embodiment, the use of the distance map DM can help the planning subject complete collision ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More