Method and device for calibrating lever arm between inertial measurement unit and global navigation system
A technology of inertial measurement unit and global navigation system, which is applied in the direction of measuring device, radio wave measurement system, satellite radio beacon positioning system, etc., and can solve the problems of non-estimation and large installation error angle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
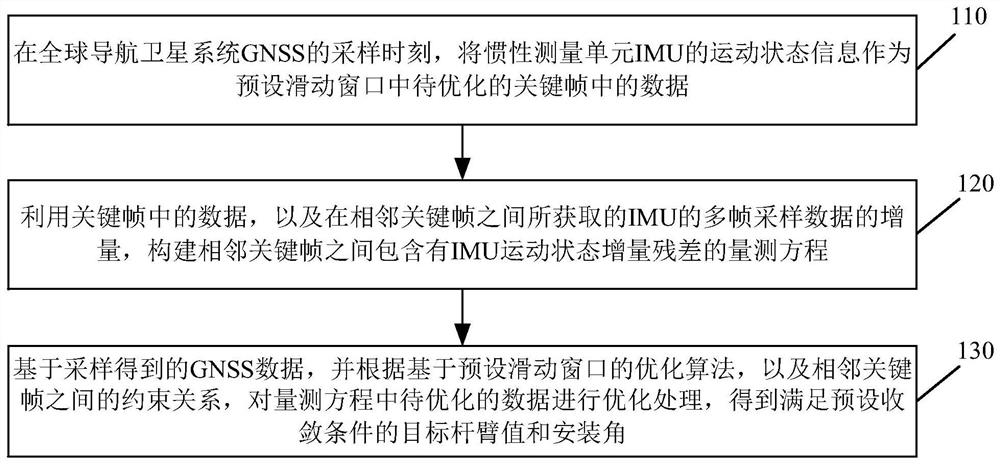
[0069] see figure 1 , figure 1 It is a schematic flowchart of a calibration method for a lever arm between an inertial measurement unit and a global navigation system provided by an embodiment of the present invention. This method is applied in automatic driving, and can be executed by the calibration device of the lever arm between the inertial measurement unit and the global navigation system. This device can be realized by means of software and / or hardware, and generally can be integrated in the on-board computer, on-board industrial control computer In a vehicle-mounted terminal such as an Industrial personal Computer (IPC), the embodiments of the present invention are not limited. Such as figure 1 As shown, the method provided in this embodiment specifically includes:
[0070] 110. At the sampling time of the global navigation satellite system (GNSS), use the motion state information of the inertial measurement unit (IMU) as the data in the key frame to be optimized in...
Embodiment 3
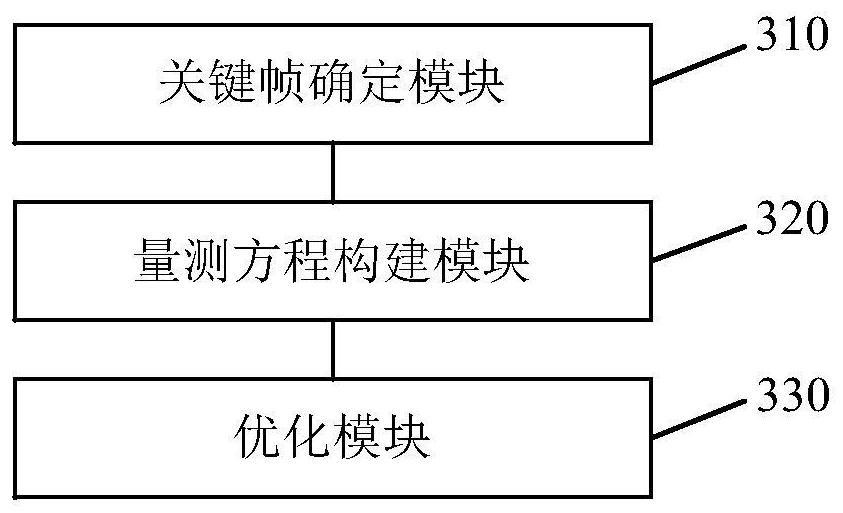
[0107] see image 3 , image 3 It is a structural schematic diagram of a calibration device for a lever arm between an inertial measurement unit and a global navigation system provided by an embodiment of the present invention. Such as image 3 As shown, the device includes: a key frame determination module 310, a measurement equation construction module 320 and an optimization module 330; wherein,
[0108] The key frame determination module 310 is configured to use the motion state information of the inertial measurement unit IMU as the data in the key frame to be optimized in the preset sliding window at the sampling time of the global navigation satellite system GNSS, the motion state information includes position , posture and speed;
[0109] The measurement equation construction module 320 is configured to use the data in the key frame and the increment of the multi-frame sampling data of the IMU acquired between adjacent key frames to construct the IMU between adjacen...
Embodiment 4
[0132] see Figure 4 , Figure 4 It is a schematic structural diagram of a vehicle-mounted terminal provided by an embodiment of the present invention. Such as Figure 4 As shown, the vehicle terminal may include:
[0133] A memory 701 storing executable program codes;
[0134] a processor 702 coupled to the memory 701;
[0135] Wherein, the processor 702 invokes the executable program code stored in the memory 701 to execute the method for calibrating the lever arm between the inertial measurement unit and the global navigation system provided by any embodiment of the present invention.
[0136] The embodiment of the present invention discloses a computer-readable storage medium storing a computer program, wherein the computer program enables the computer to execute the method for calibrating the lever arm between the inertial measurement unit and the global navigation system provided by any embodiment of the present invention.
[0137]The embodiment of the present inven...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More