

A tendon-driven fully-actuated humanoid dexterous hand
A fully-driven, dexterous hand technology, applied in the field of bionic robots, can solve the problems of elastic elements occupying finger space, easy interference between tendons and fingers, and large internal space in the palm, so as to achieve quick response, simple and fast assembly and disassembly, and structural compact and reasonable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
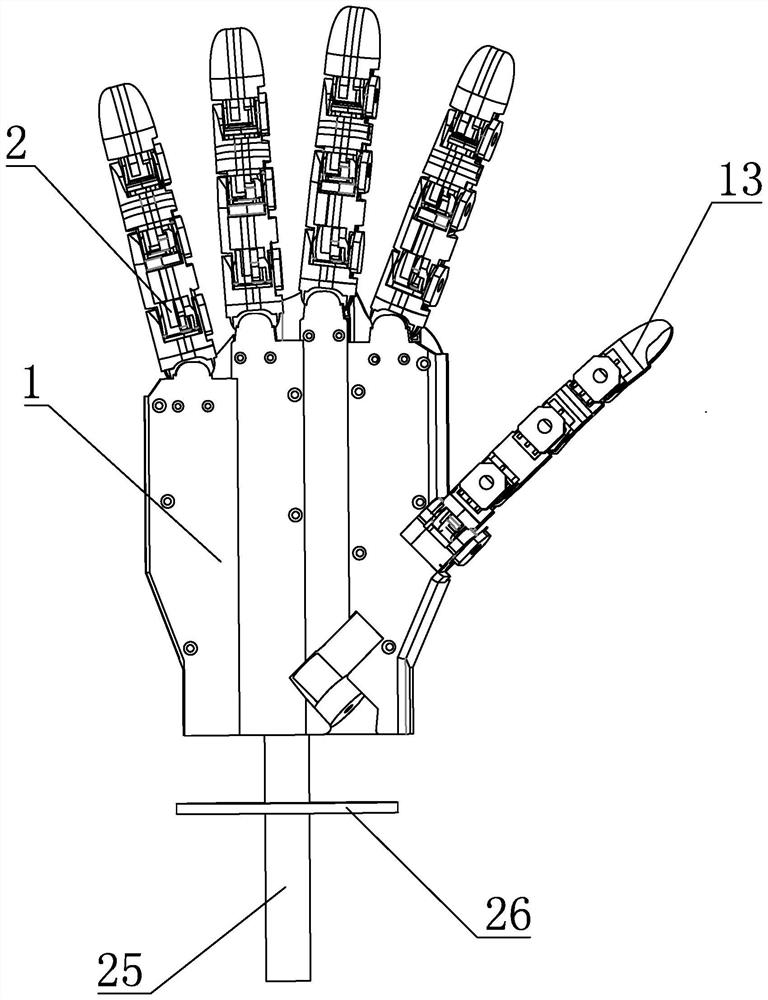
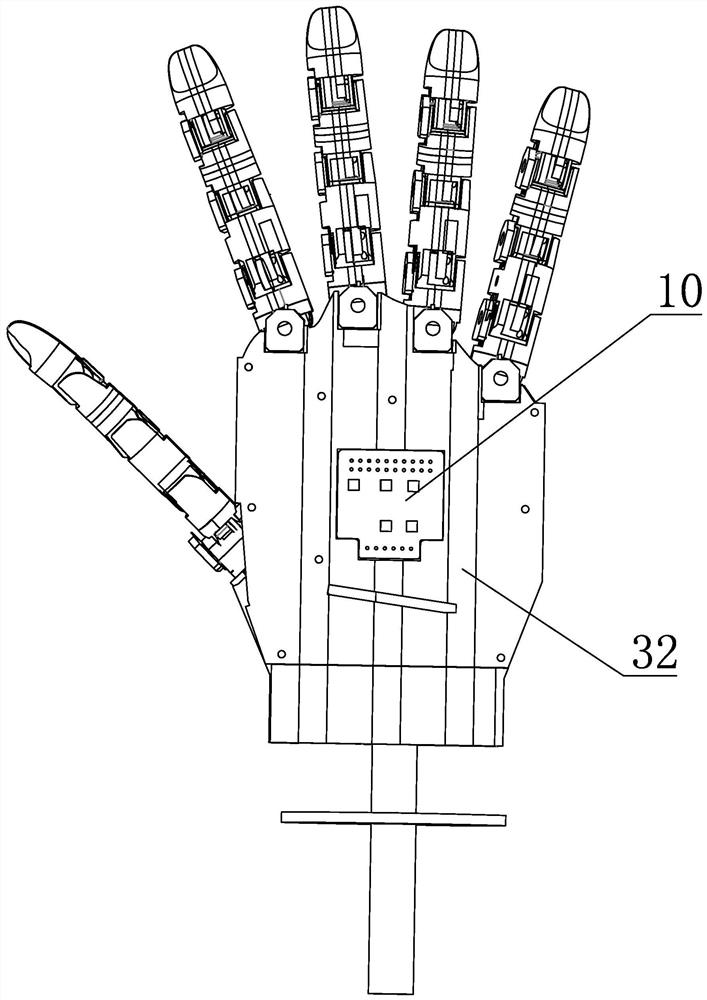
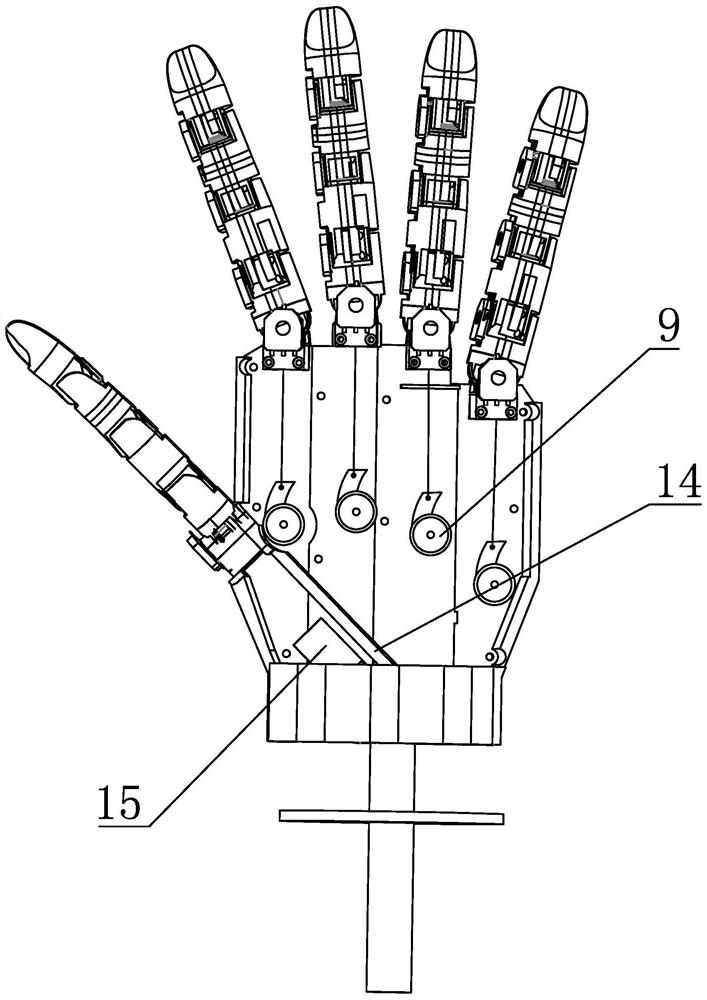
[0033] Such as Figure 1 to Figure 8 As shown, a tendon-driven fully-driven humanoid dexterous hand includes a palm 1 and several finger base joints 2. The finger base joints include a swing joint 3 and a bending joint group, and the bending joint group includes several hinged joints. Joint 4, one end of the swing joint is connected with the palm, the other end of the swing joint is connected with the bending joint, roller skating is provided at the junction of two adjacent bending joints, and bending tendon rope 5 is arranged in the finger base joint. The restoring tendon rope 6 and the swinging tendon rope 7 are provided with a first slot 8 on the swing joint, and the bent tendon rope, restoring tendon rope and swinging tendon rope pass through the first slot and are connected to the palm. There is a constant force spring 9 connected to the recovery tendon rope, and the constant force spring corresponds to the base joints of the fingers one by one. Angle sensors are provided...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More