Near-space hypersonic target trajectory prediction method
A technology of hypersonic speed and target trajectory, applied in geometric CAD, sustainable transportation, special data processing applications, etc., can solve the problems of difficult online estimation, large error, complex and changeable hypersonic target guidance law, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0118] Specific Embodiment 1: This embodiment provides a hypersonic target trajectory prediction method in adjacent space, and the steps are realized through the following steps:
[0119] Step 1: decompose the obtained historical ballistic data into ballistic trend signal and ballistic cycle jump signal;
[0120] Step 2: Model the trend signal;
[0121] Step 3: Model the cycle-hopping signal;
[0122] Step 4: Superpose the trend signal model established in step 2 and the period jump signal model established in step 3 to obtain a complete parametric model of the ballistic trajectory, and then realize trajectory prediction based on the complete model extrapolation.
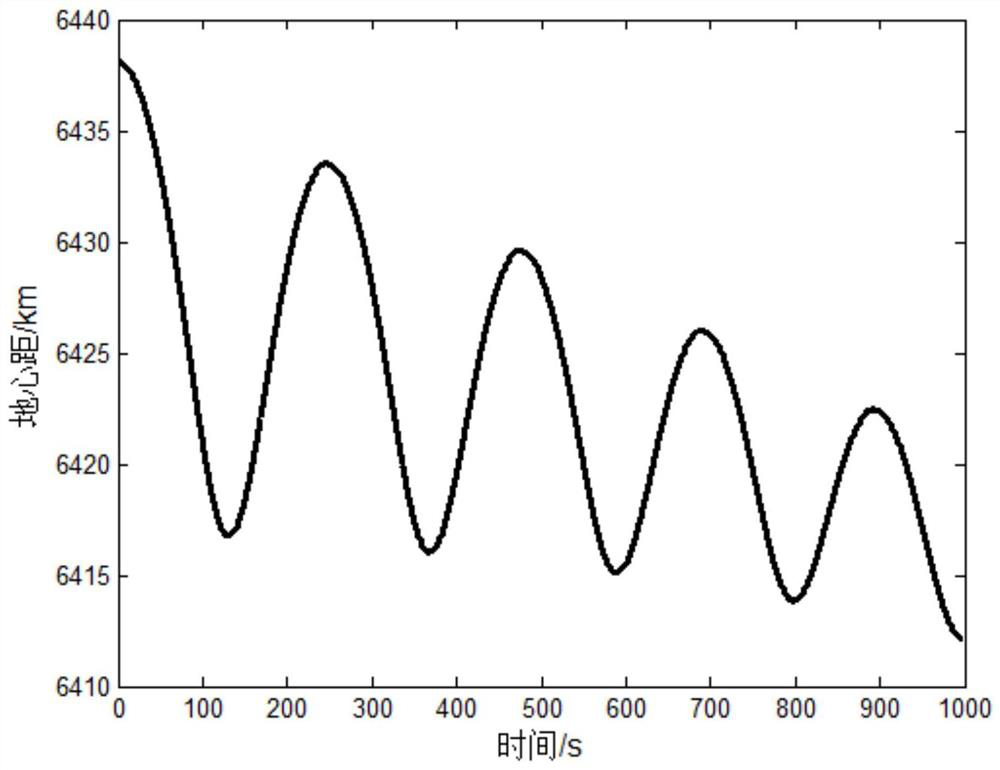
[0123] In this embodiment, in step 1, the obtained historical ballistic data is decomposed into a ballistic trend signal and a ballistic period jump signal by using an integrated empirical mode decomposition method. Hypersonic target ballistic data is a nonlinear, non-stationary signal, with obvious trends and per...
specific Embodiment approach 2
[0127] Specific embodiment two: this embodiment is to further limit the step one described in the specific embodiment one. In this embodiment, the specific content of the step one is: adopt the integrated empirical mode decomposition method to decompose the gained historical ballistic data into Ballistic trend signal and ballistic period jump signal, where the integrated empirical mode decomposition method is as follows:
[0128] Step 11: Add K groups of Gaussian white noise sequences G to the ballistic sequence X(n) k , get the noise-added signal X k (n), namely:
[0129] x k (n)=X(n)+G k (1)
[0130] In the formula, k=1,...,K
[0131] Step 1 and 2: Add noise signal X to each group k (n) Carry out EMD decomposition, obtain I intrinsic mode function IMF component and residual term:
[0132]
[0133] Step 13: Take the mean value of the output of K times EMD decomposition as the decomposition result of the integrated empirical mode decomposition:
[0134]
[0135]...
specific Embodiment approach 3
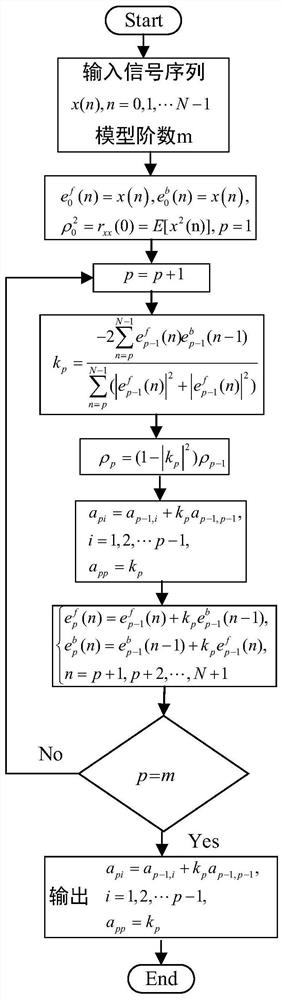
[0140] Specific embodiment three: This embodiment is to further limit the step two described in the specific embodiment one. In this embodiment, the specific content of the step two is: using the autoregressive (AR) modeling method to analyze the trend signal For modeling, the model order and model coefficients determine the modeling accuracy, and the autoregressive (AR) modeling method is as follows:
[0141] Step 21: Autoregressive model coefficient estimation;
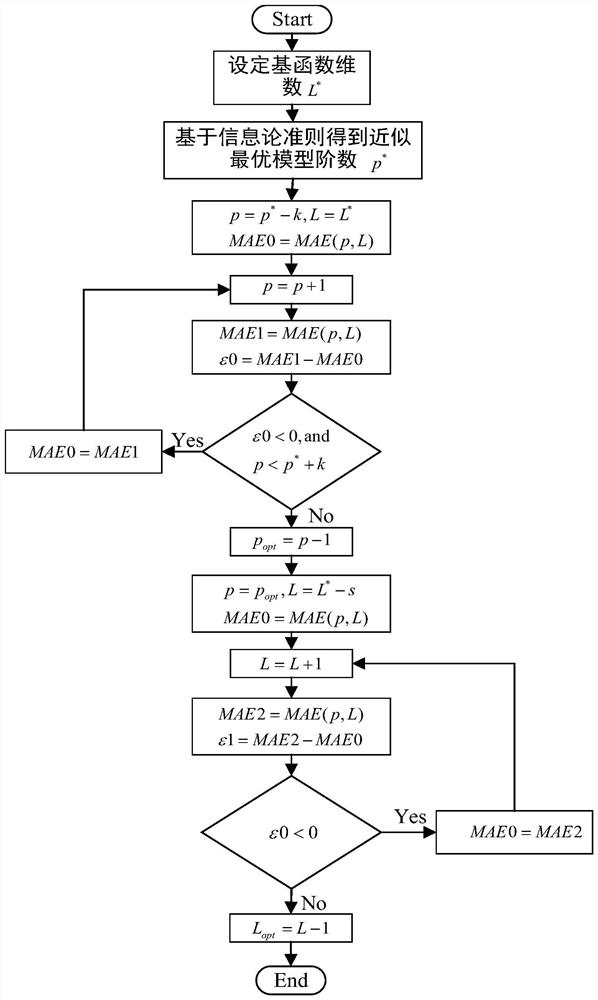
[0142] Step 22: Autoregressive model order selection.
[0143] Other compositions and connection methods are the same as those in the second embodiment.
[0144] In this embodiment, the trend signal R D (n) is a linear, slow-varying, low-frequency signal, a stationary signal whose period and amplitude vary with time, so the autoregressive (AR) modeling method is sufficient to accurately ensure the stability and accuracy of the modeling.
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap