

Anti-vibration control method for a motor of a hydrogen fuel cell vehicle
A fuel cell and control method technology, applied in electric vehicles, control drives, control devices, etc., can solve the problems of complex process, increased cost, and immature anti-shake control technology.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
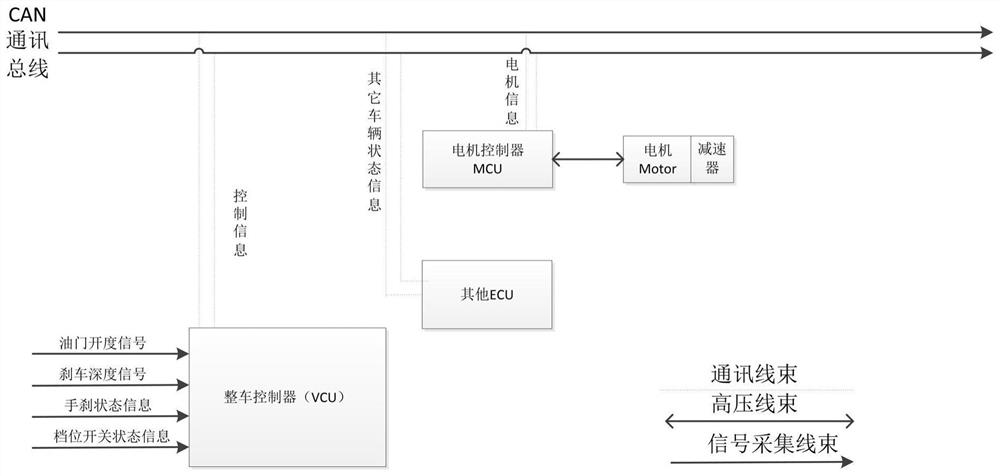
[0024] Such as figure 1 As shown, a schematic diagram of the motor anti-shake control system of the anti-shake control method of the motor of a hydrogen fuel cell vehicle; the anti-shake control method of the motor is realized based on the vehicle controller, the motor controller, the motor and the reducer; the vehicle control The device is electrically connected to the motor controller; the anti-shake control method includes:
[0025] The vehicle controller recognizes the driver's operation intention by collecting the handbrake status signal, brake depth signal and gear position status signal, and judges whether the vehicle has the conditions to enter the motor anti-shake preparation state according to the driver's operation intention;
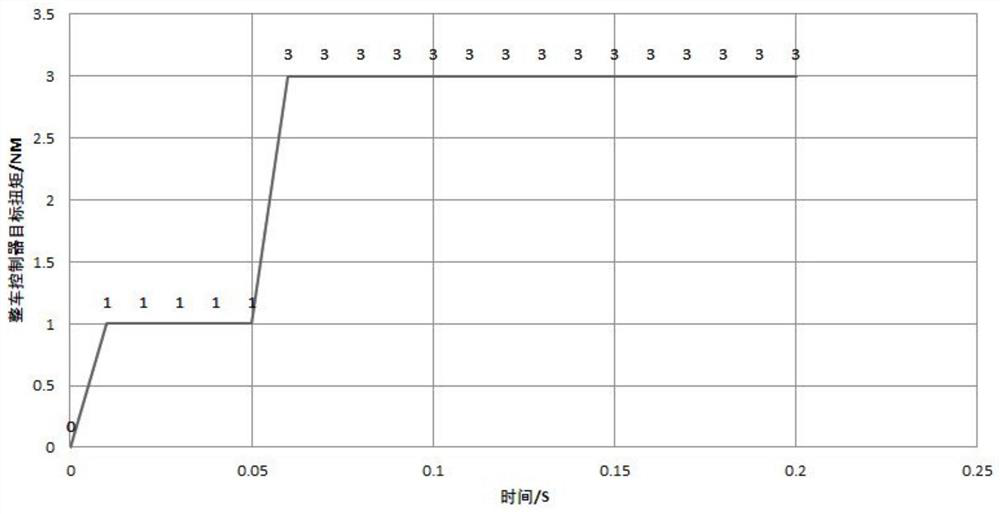
[0026] When the vehicle controller judges that the vehicle has the conditions to enter the motor anti-shake preparation state, the vehicle controller collects the data of the accelerator opening signal, brake depth signal, gear status signal,...
Embodiment 2
[0034] The steps in this embodiment are basically the same as in Embodiment 1, except that the first target torque is 2Nm, the first target torque lasts for 7 frames, and the period of each frame is 5ms; the second target torque is 4Nm; the third target torque The torque is -2Nm, the third target torque lasts for 7 frames, and the period of each frame is 5ms; the fourth target torque is -4Nm.
Embodiment 3
[0036] The steps in this embodiment are basically the same as in Embodiment 1, except that the first target torque is 1Nm, the first target torque lasts for 3 frames, and the period of each frame is 20ms; the second target torque is 2Nm; the third target torque The torque is -1Nm, the third target torque lasts for 3 frames, and the period of each frame is 20ms; the fourth target torque is -2Nm.
[0037] What is not involved above is applicable to the prior art.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More