High-precision indirect transmission servo stability control method
A servo stabilization and control method technology, applied in the field of servo control, can solve the problems of slow response speed, interference observation delay, error, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be described in detail below with reference to the accompanying drawings and examples.
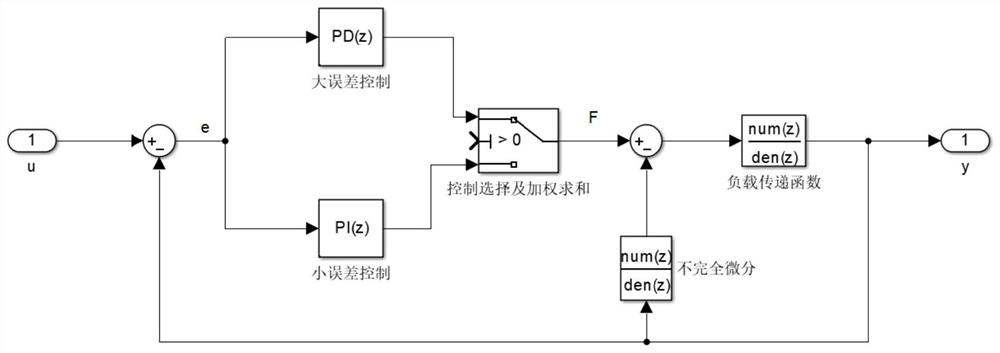
[0044] The present invention provides a high-precision indirect transmission servo stabilization control method, which is used to perform servo stabilization control on the stable platform of the seeker, and the method includes the following steps:
[0045] Three error thresholds are set, including a first threshold E1, a second threshold E2, and a third threshold E3, where E1
[0046] The difference between the control output value u and the stable control value y of the current sampling period of the seeker stabilization platform is taken as the error e, if e>E3, the current sampling period is in the stage of large error, if e
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More