Manipulator assembling method, computer readable storage medium and intelligent manipulator
An assembly method and manipulator technology, applied in the field of manipulators, can solve problems such as inability to realize manipulator assembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0029]The control device mentioned below includes a computer-readable storage medium and a processor connected to each other, and a computer program is stored in the computer-readable storage medium, and the computer program realizes the function of the control device when executed by the processor.
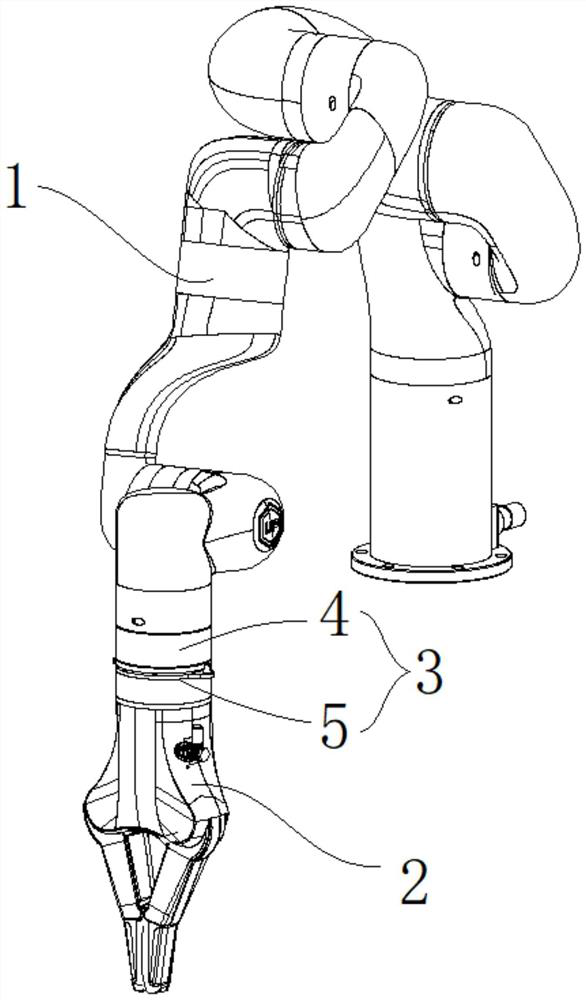
[0030]Smart manipulators such asfigure 1 As shown, it includes a mechanical arm 1 and a clamping jaw 2 for grasping objects. The clamping jaw 2 is installed on the mechanical arm 1 using a jaw changing mechanism 3 so that the mechanical arm 1 can drive the clamping jaw 2 to move. The jaw changing mechanism 3 includes an arm connecting piece 4 and a jaw connecting piece 5. The arm connecting piece 4 is fixedly installed at the end of the mechanical arm 1, and the jaw connecting piece 5 is fixedly installed on the top of the clamping jaw 2, so that the arm The connecting piece 4 and the claw connecting piece 5 are connected to each other so that the mechanical arm 1 and the clamping jaw 2 c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com