

A multi-lane space-time trajectory optimization method for intelligent networked vehicles
A technology of space-time trajectory and optimization method, which is applied to the traffic control system, instrument, and control traffic signal of road vehicles, etc., can solve the problem of lack of surrounding vehicle interference factors, limited information acquisition ability, and lack of real-time, efficient and accurate vehicle driving information. and traffic status information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] 1. A method for calculating state vectors of intelligent connected vehicles based on vehicle-road information coupling
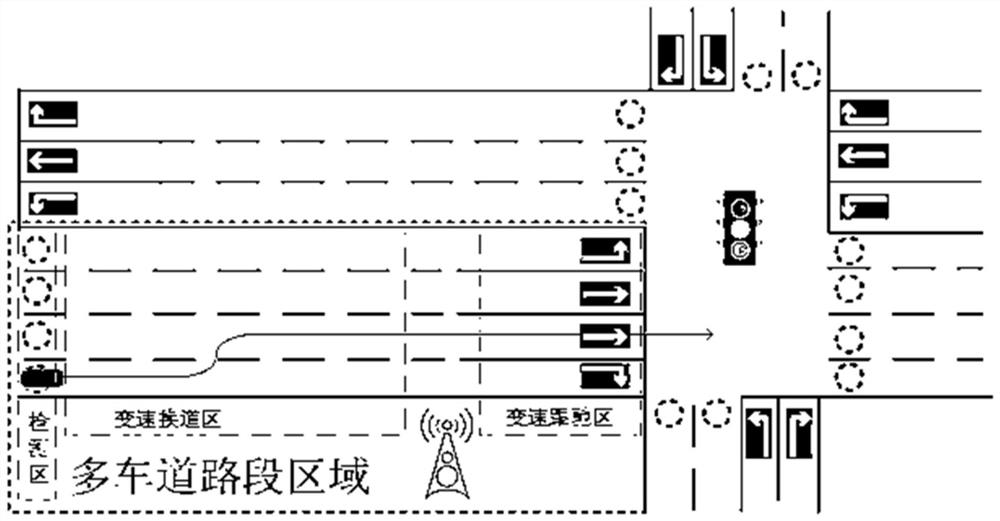
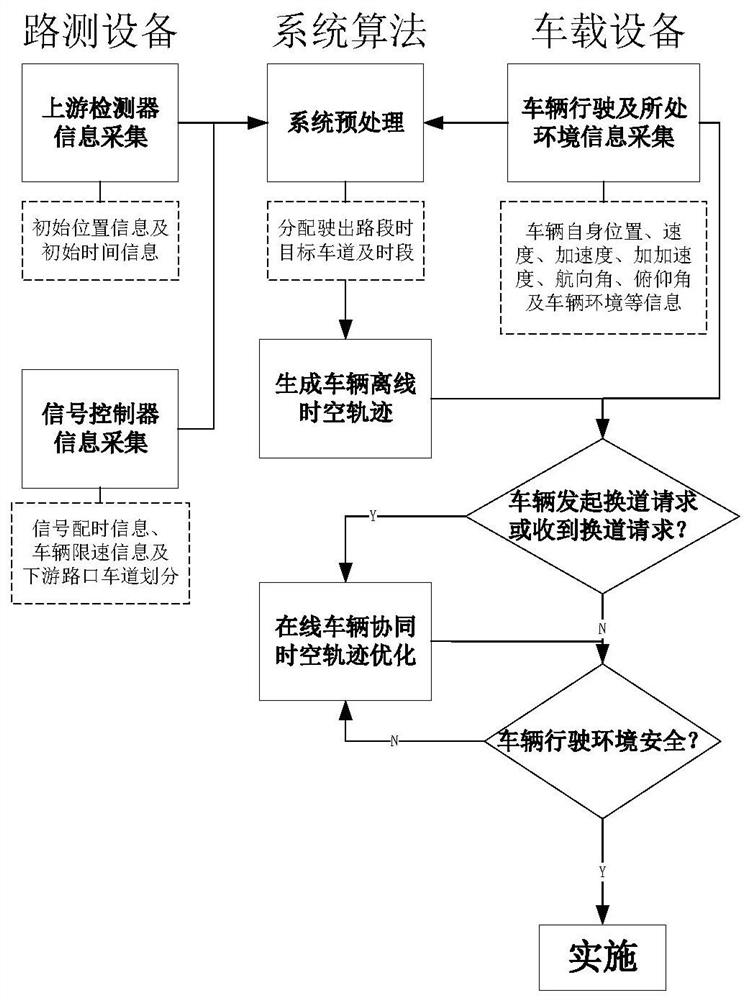
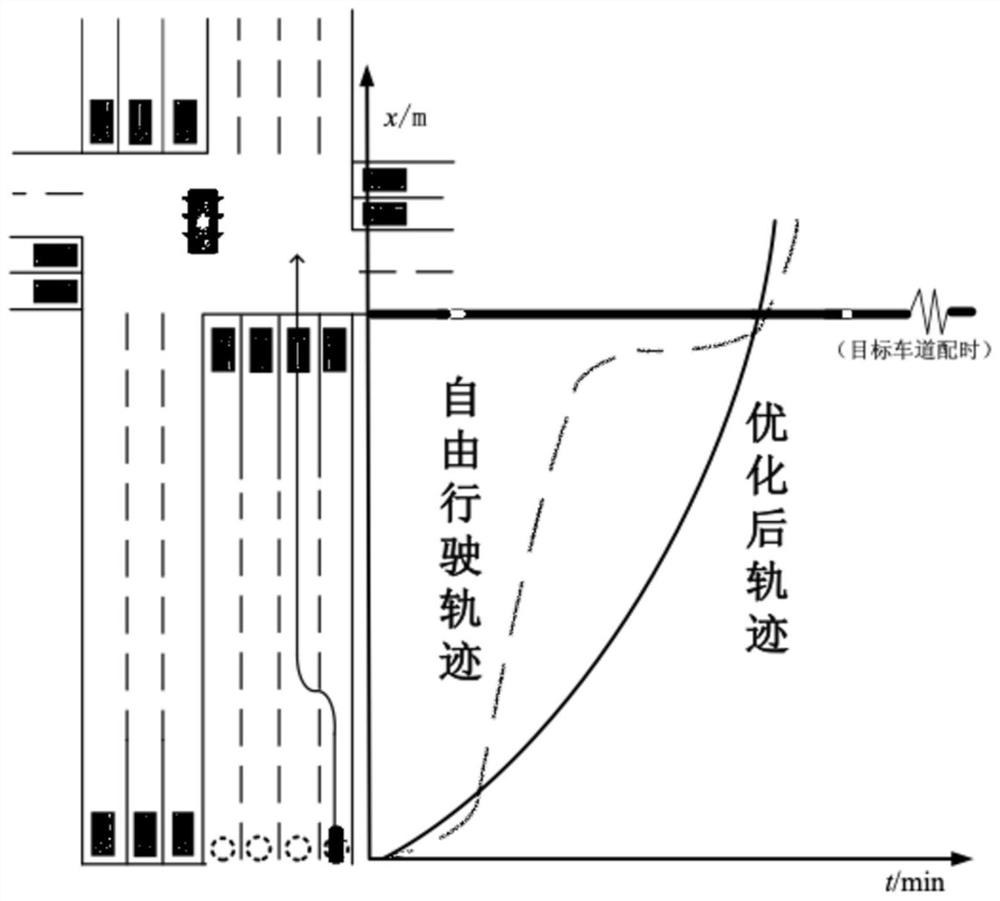
[0057] The multi-lane spatio-temporal trajectory optimization method based on V2X firstly redefines the state vector of the vehicle. In the state vector of the vehicle, it not only includes the state information of the vehicle itself such as the conventional position, speed and acceleration, but also includes the traffic state information such as the signal timing of the target lane, the traffic density of the adjacent lane and the average speed of the traffic. The present invention firstly introduces the V2X-based multi-lane road segment scene and process architecture establishment; then, based on the environment and process, introduces the definition of the state vector of the vehicle in detail; secondly, deduces and defines the cost function and constraint conditions of the vehicle trajectory through formulas; finally, uses The minimum principle is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More