

Vehicle trajectory prediction method, control device and unmanned vehicle
A prediction method and vehicle trajectory technology, which is applied in vehicle trajectory prediction and unmanned vehicles, can solve problems such as poor accuracy and collisions with surrounding vehicles, and achieve the effects of high accuracy, high driving safety, and reduced chance of collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the above objects, features and advantages of the present invention more comprehensible, specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
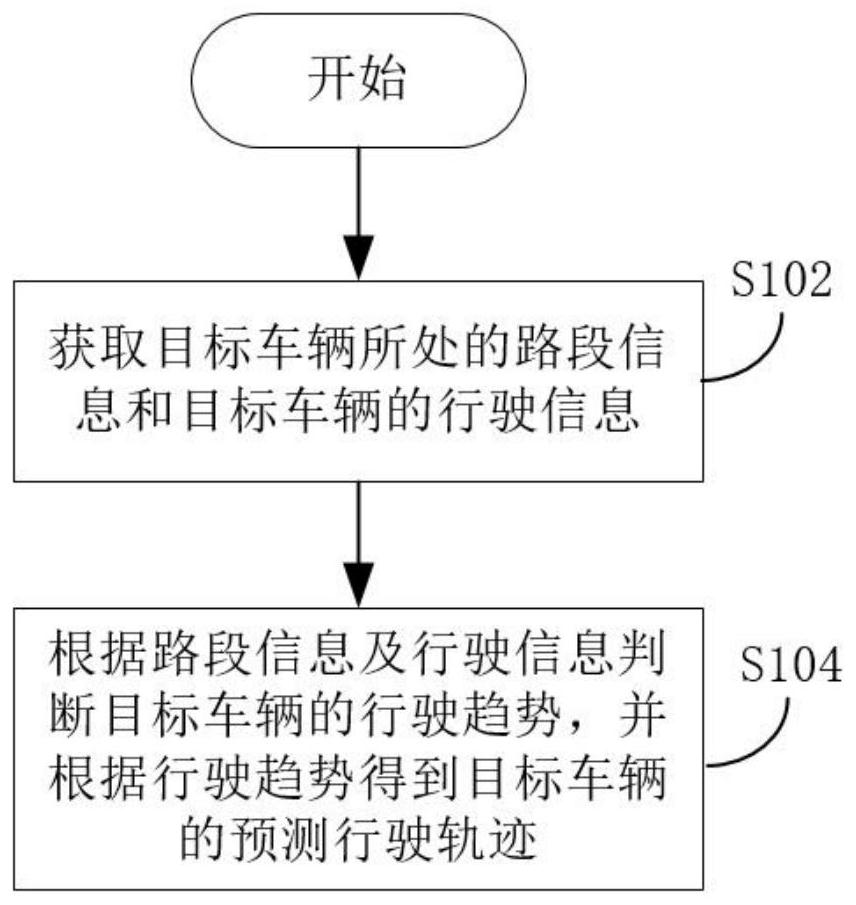
[0031] figure 1 It is a schematic flowchart of the first vehicle trajectory prediction method according to an embodiment of the present invention. Such as figure 1 As shown, the vehicle trajectory prediction method includes:
[0032] S102 Obtain information about the road section where the target vehicle 4 is located and travel information of the target vehicle 4 .
[0033] Road section information can include continuous road sections (that is, road sections that do not include forks) and intersections (such as crossroads, T-junctions, etc.) according to road conditions. Specifically, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More