

A control-by-wire chassis system for an unmanned vehicle with four-wheel independent steering
A technology of unmanned vehicles and four-wheel independent steering, which is applied to vehicle components, steering mechanisms, elastic suspensions, etc. The effect of small resistance, guaranteed driving precision and guaranteed control precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030]By the followingFigure 1 to 8 The present invention will be described in detail, and the technical solutions in the embodiments of the present invention will be described, and it is clearly described, and it is understood that the described embodiments are merely embodiments of the invention, not all of the embodiments. Based on the embodiments of the present invention, there are all other embodiments obtained without making creative labor without making creative labor premises.
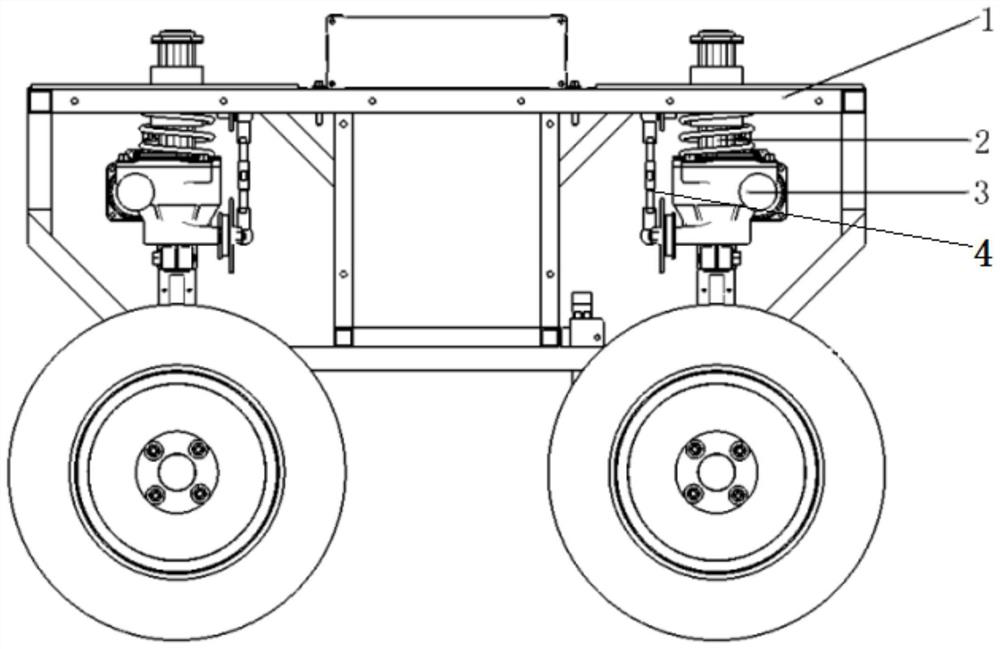
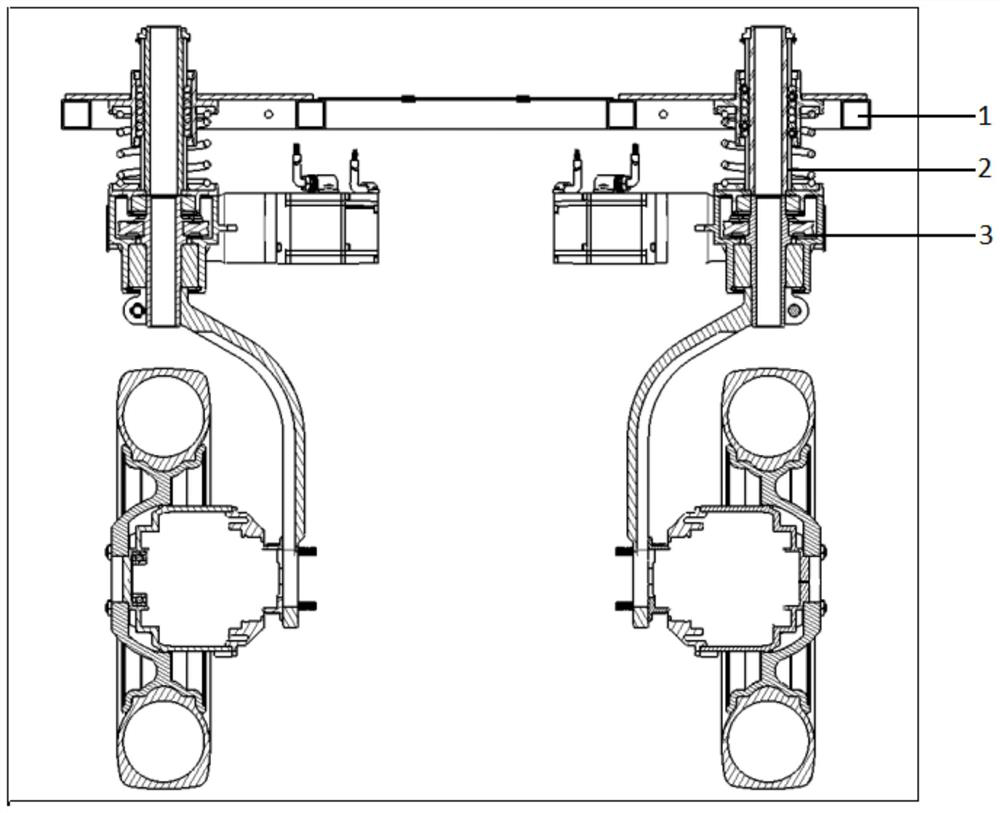
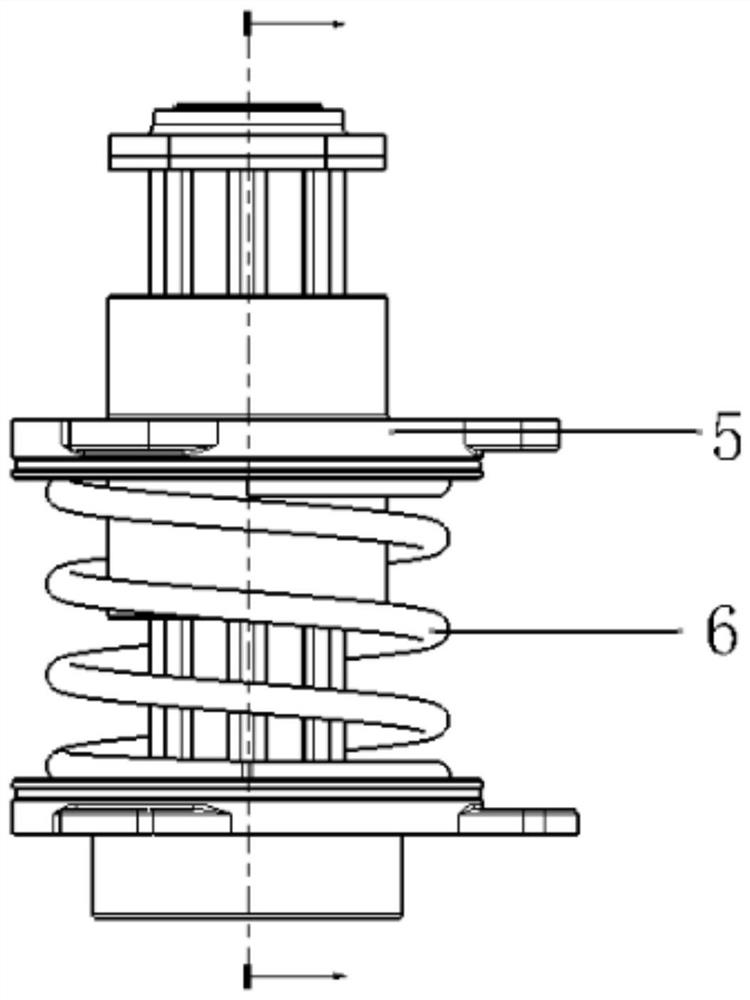
[0031]The present invention provides a line-control chassis system that provides a four-wheel independent transfer of unmanned vehicles here in this way.Figure 1 - Figure 8As shown, a four-wheel independently turning to the wire control chassis system of the unmanned vehicle, including the body skeleton 1, further comprising a plurality of suspension systems 2 and a plurality of steering system 3 disposed below the body skeleton 1, each of which The suspension system 2 corresponds to a steering system 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More